Justin Yu

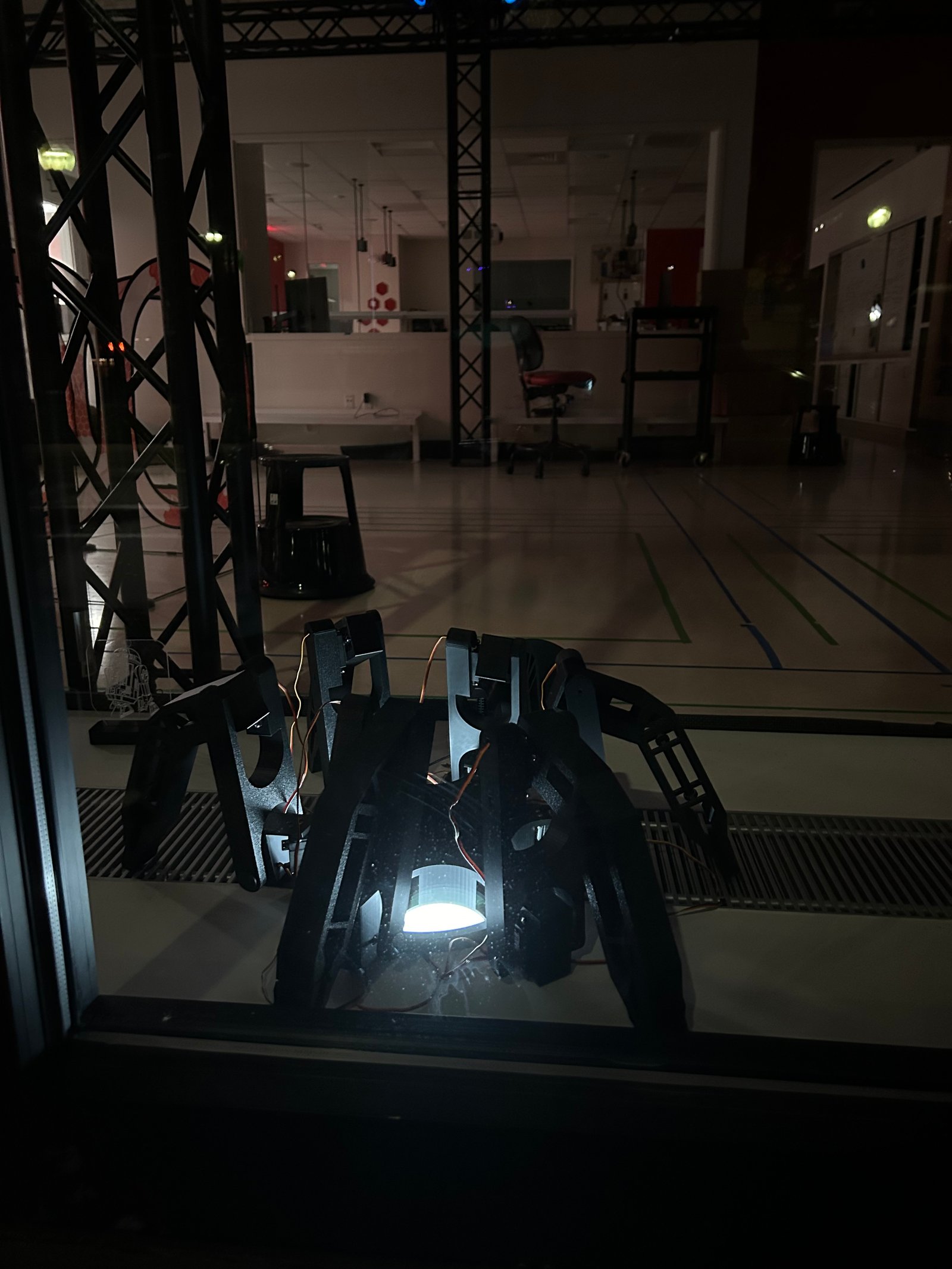
This mechapod project stemmed from a growing interest in mechatronics and robotics, driven by a desire to bridge the gap between hardware and software within electrical engineering. I began this project during the freshman year of college alongside the development of a self-coded website, it served as a practical application of various engineering skills. In the nearinf future, I hope to enhance this project's capabilities, such as integrating a robotic grapple arm or sensor system. Despite the high cost totaling over $300 for all the electrical components including the raspberry pi 4 for the purpose of acquiring a new skill; I personally funded this project while also utilizing 3D printers from my school laboratory, the project stands as a testament to my dedication to learning and honing my engineering abilities through hands-on personal projects.
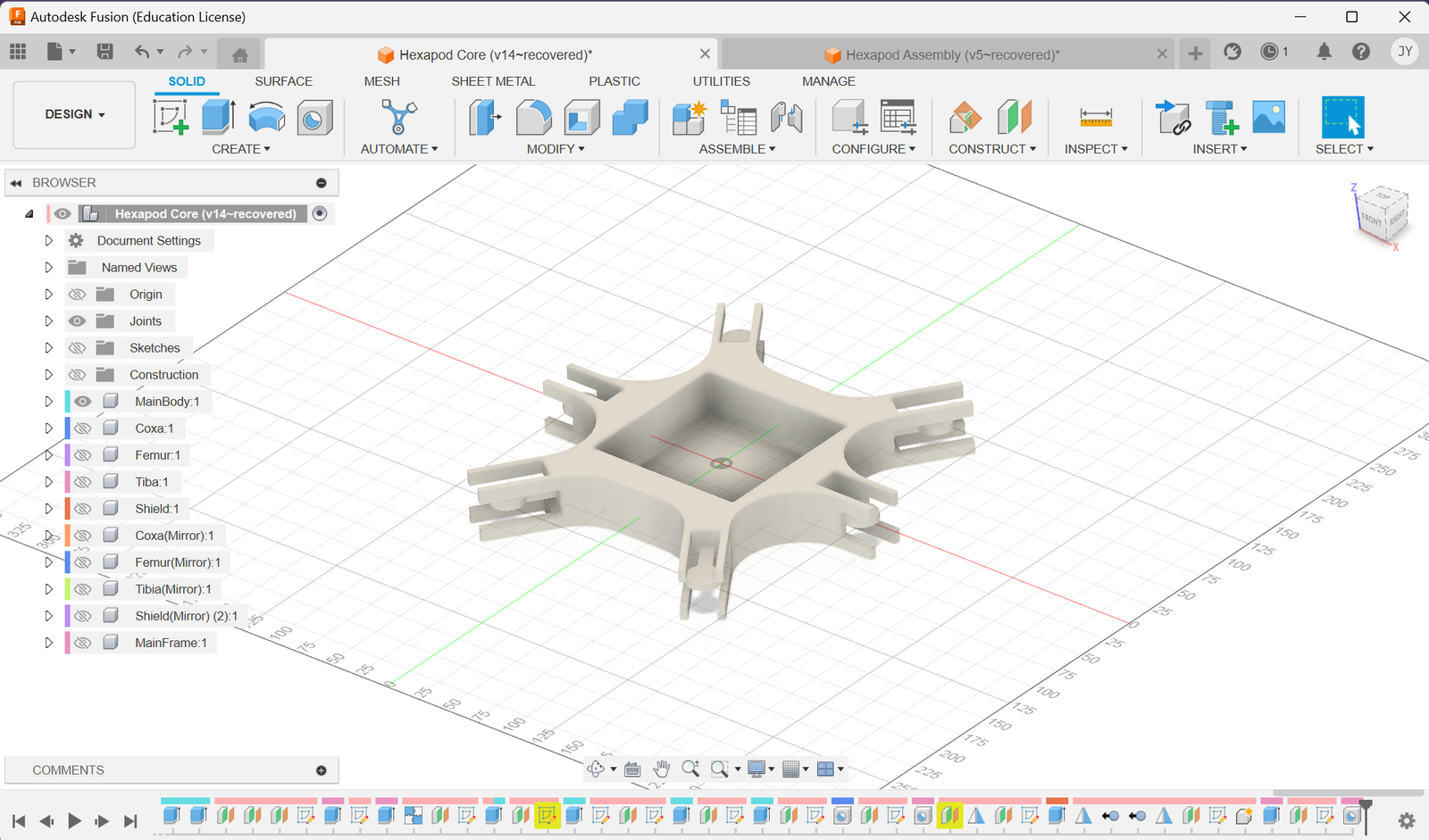
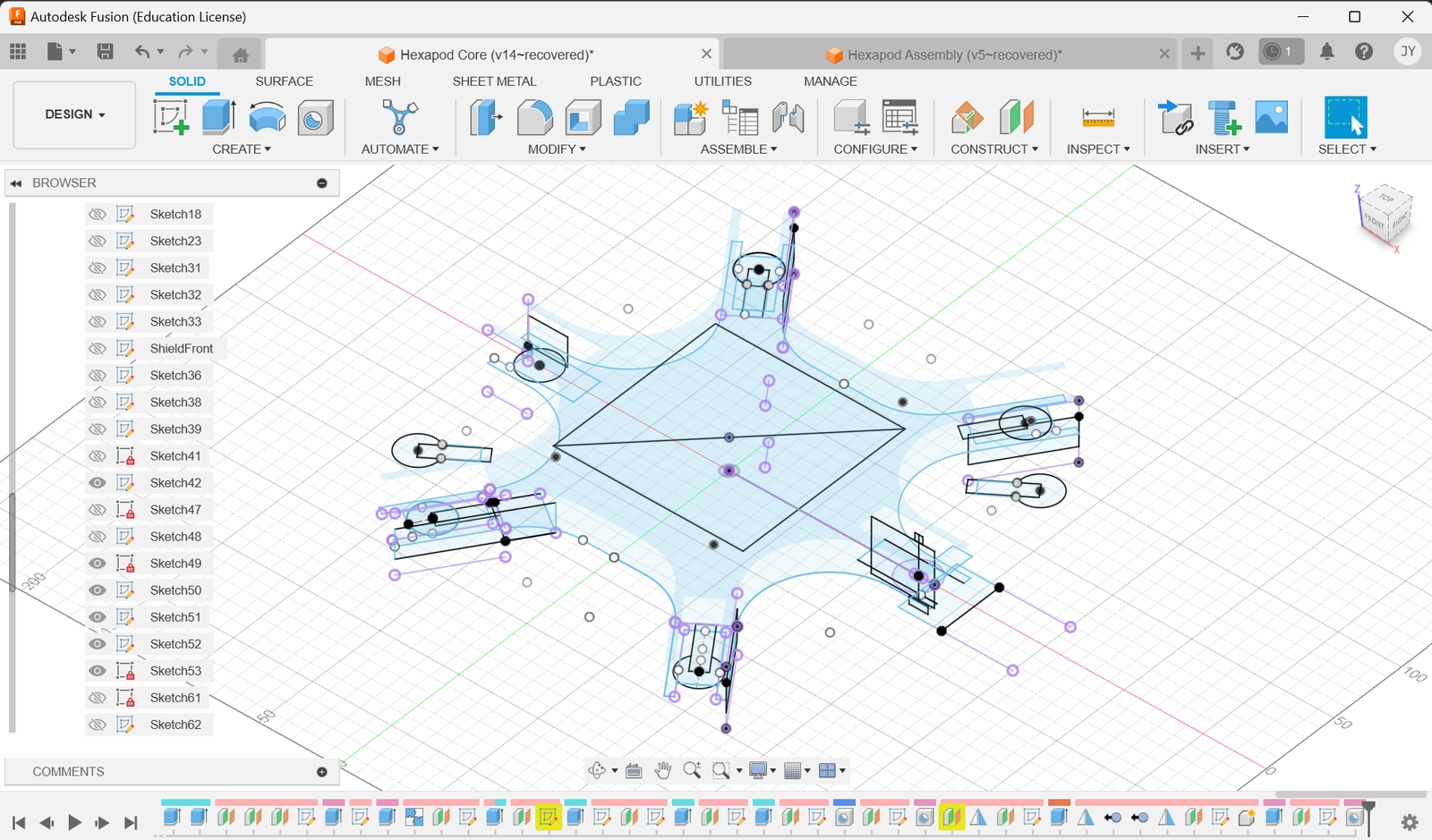
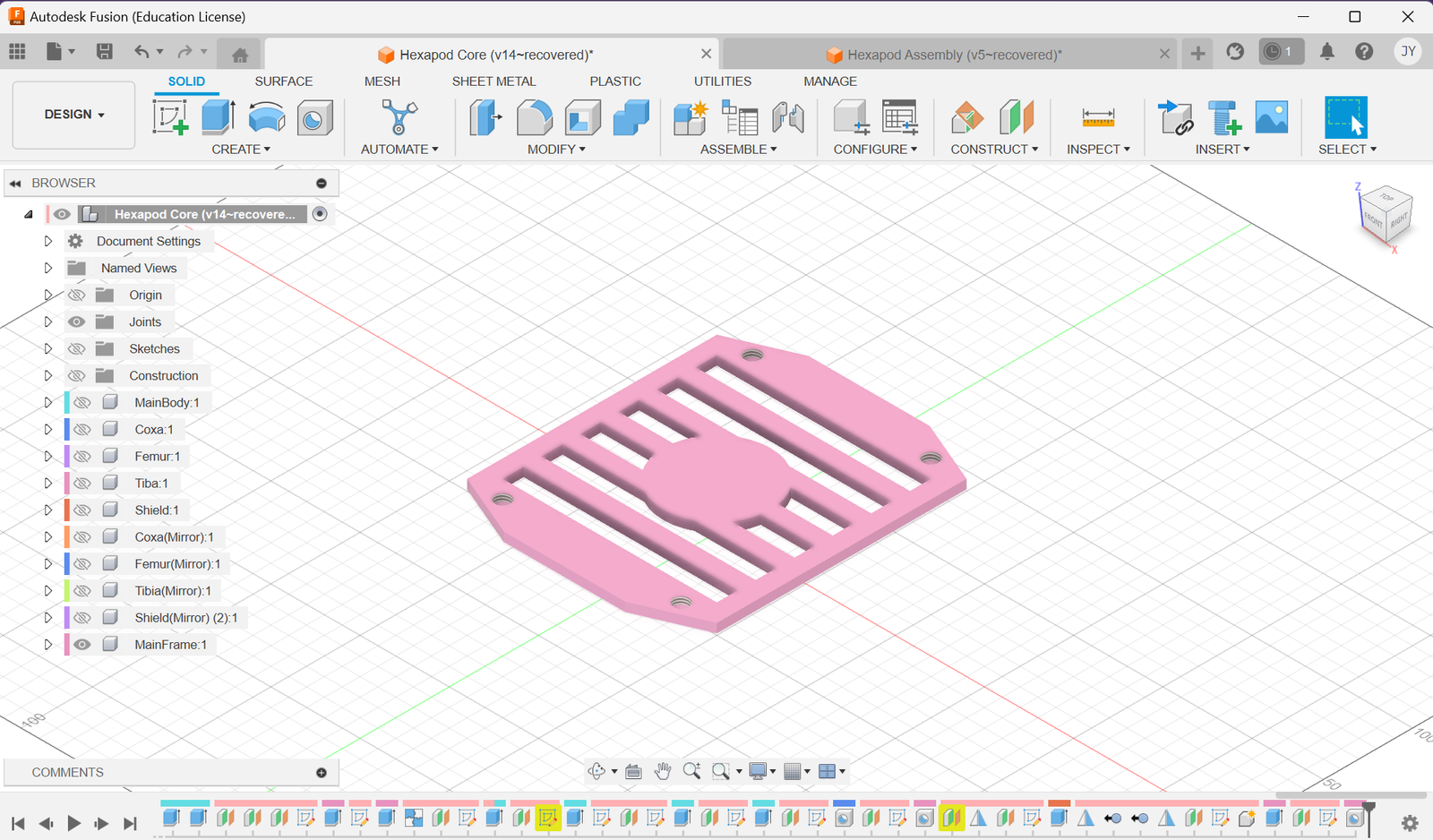
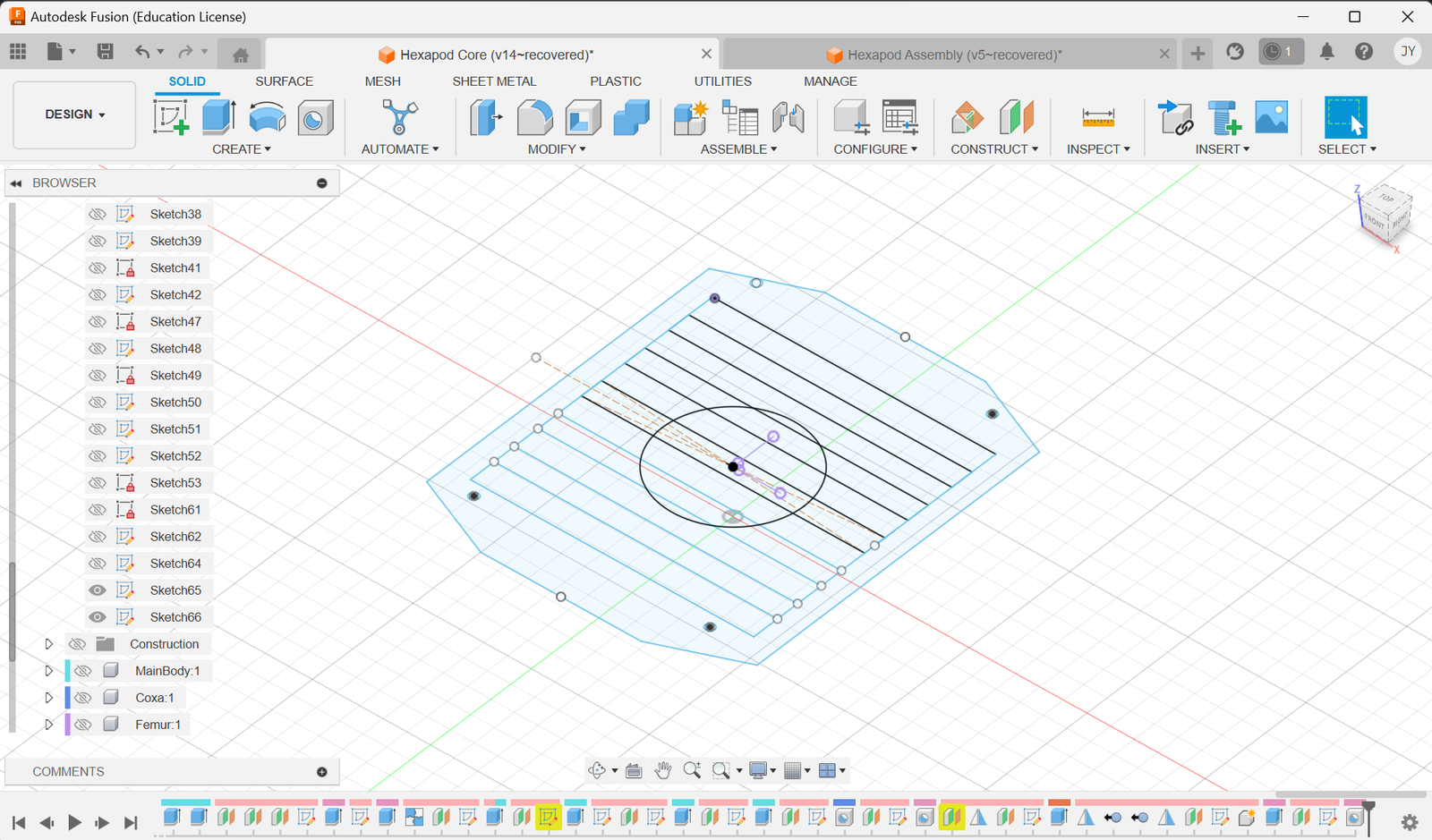
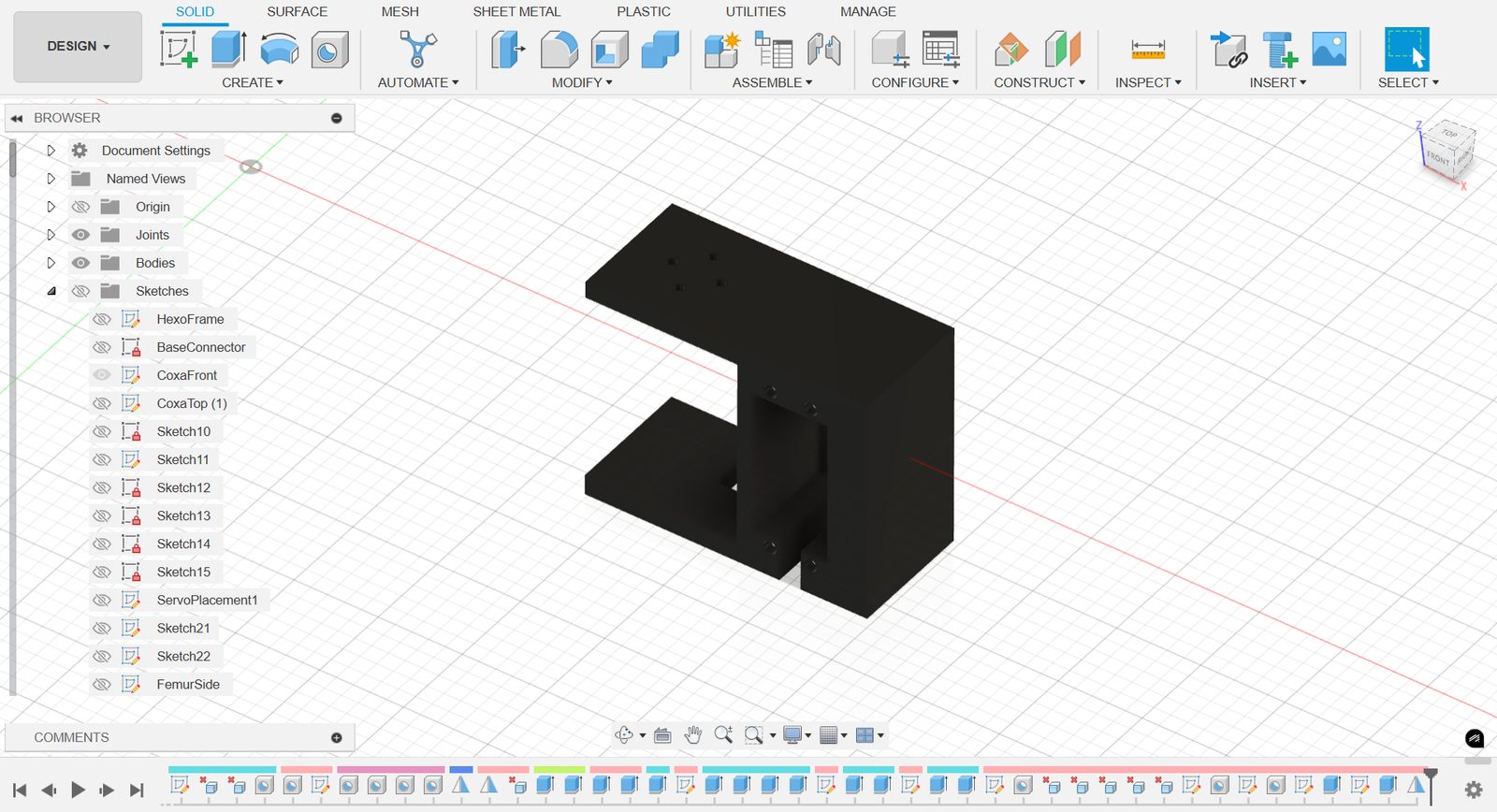
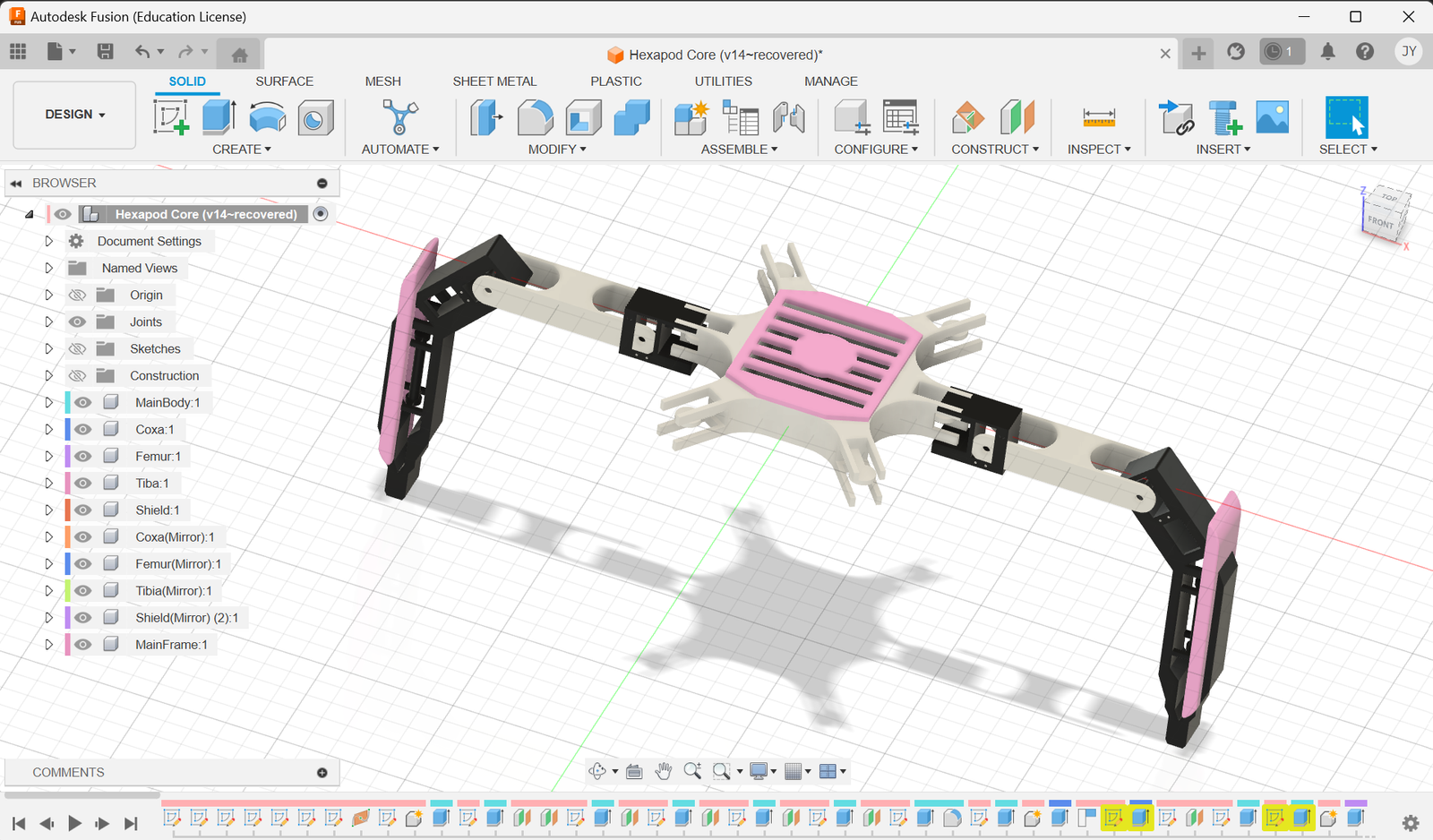
For the CAD design phase, I opted to utilize Fusion 360, my preferred software, keeping the design simple and focused on practicality rather than extravagance. I emphasized precise dimensions for the intended parts, utilizing parameters to ensure ease of adjustment. Each component of the hexapod, including the main body, coxa, femur, and tibia, was meticulously designed to accommodate servo motors, electrical components, and appropriate screw hole placements, while providing ample space for wiring connections. Additionally, I added a personal touch to the hexapod's appearance by experimenting with colors and aesthetics to achieve the desired final look.
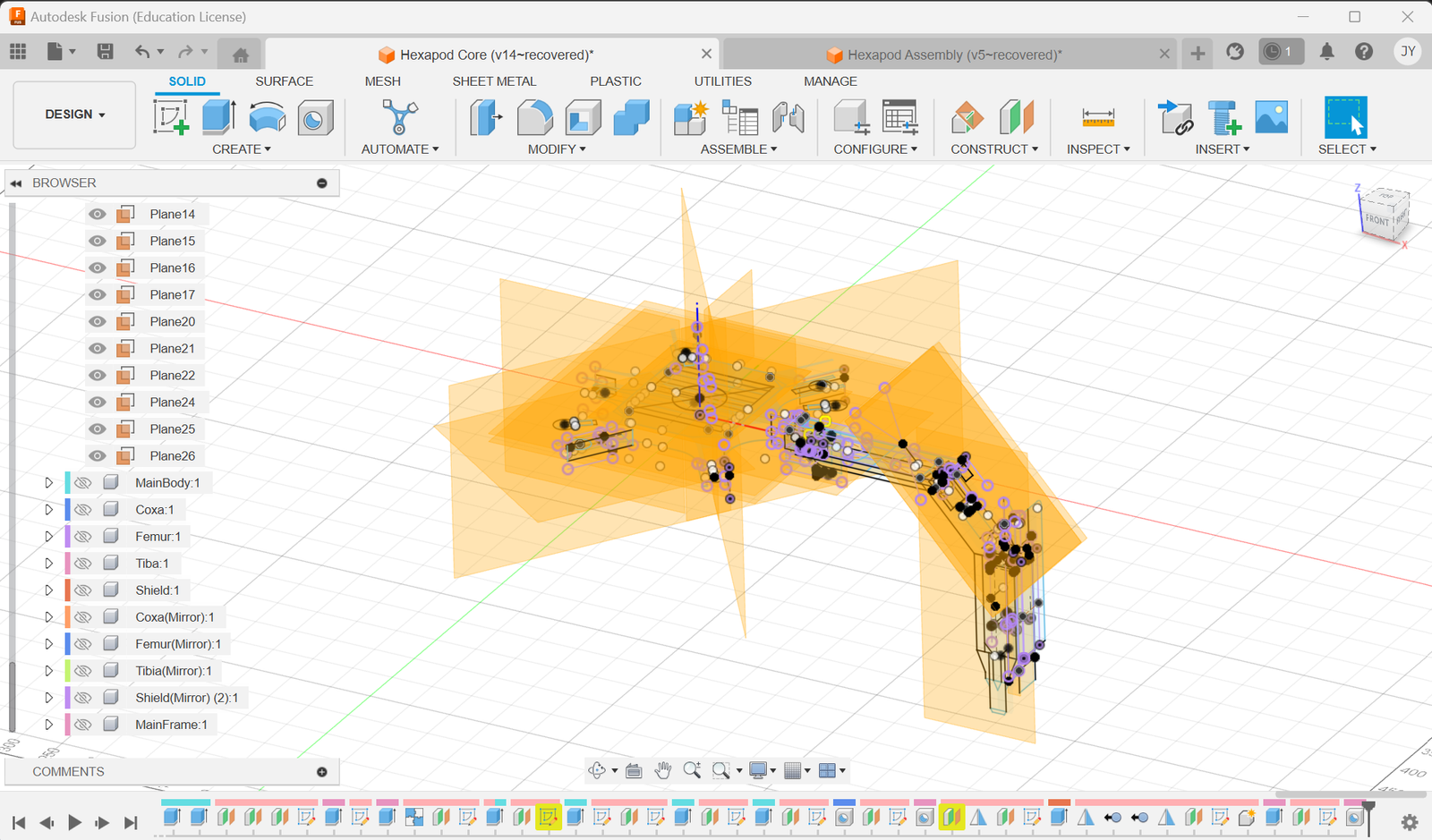
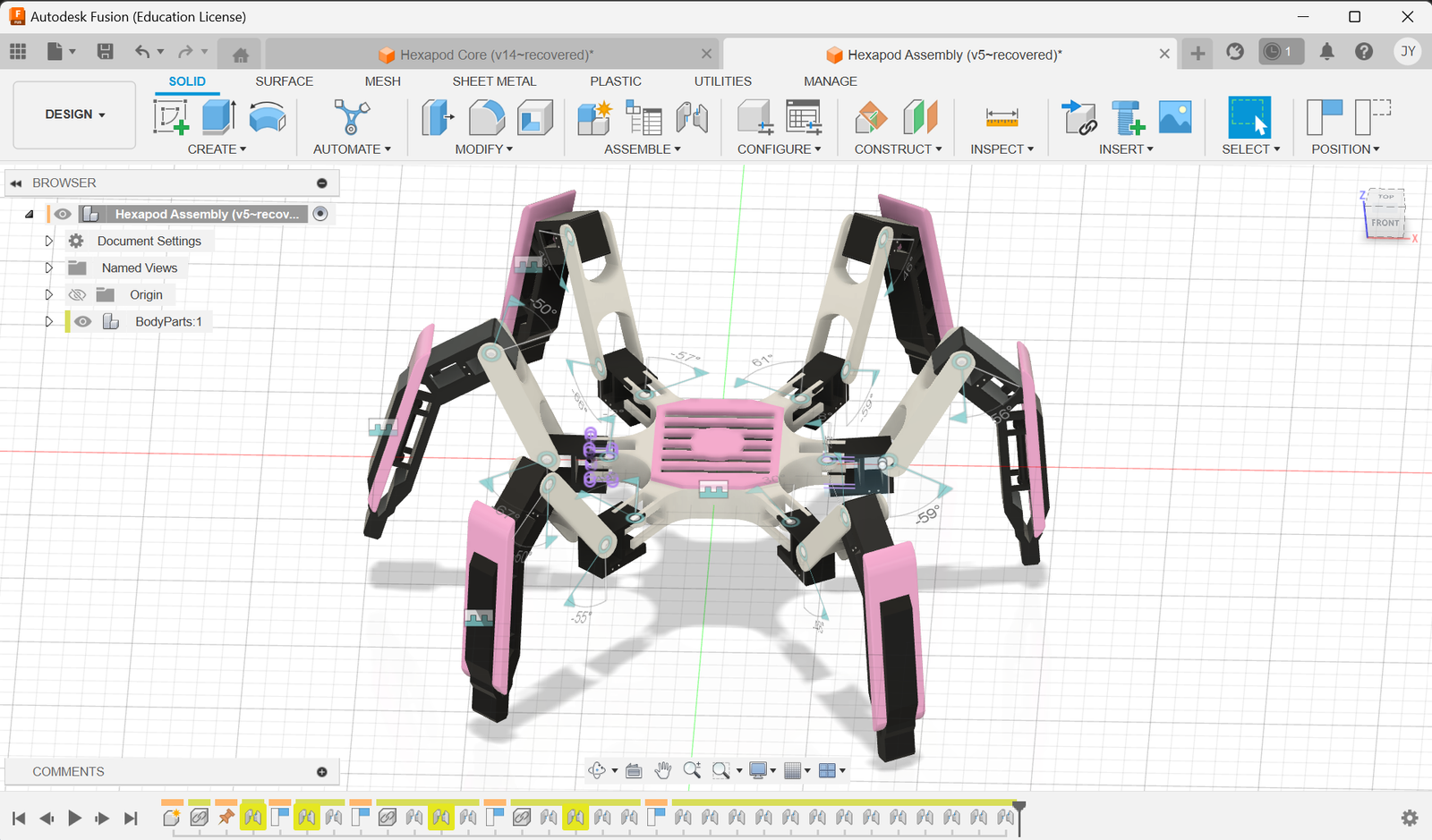
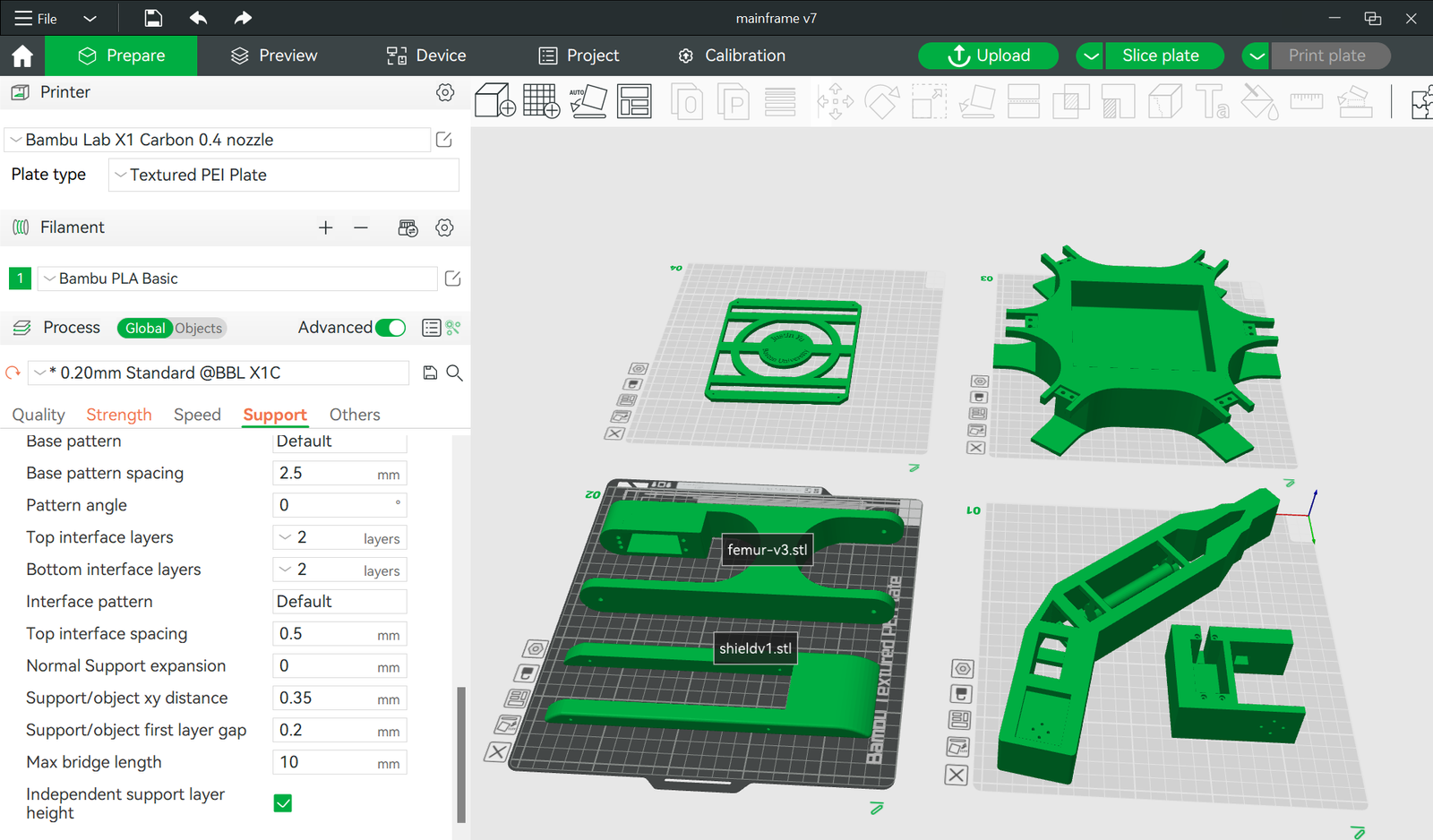
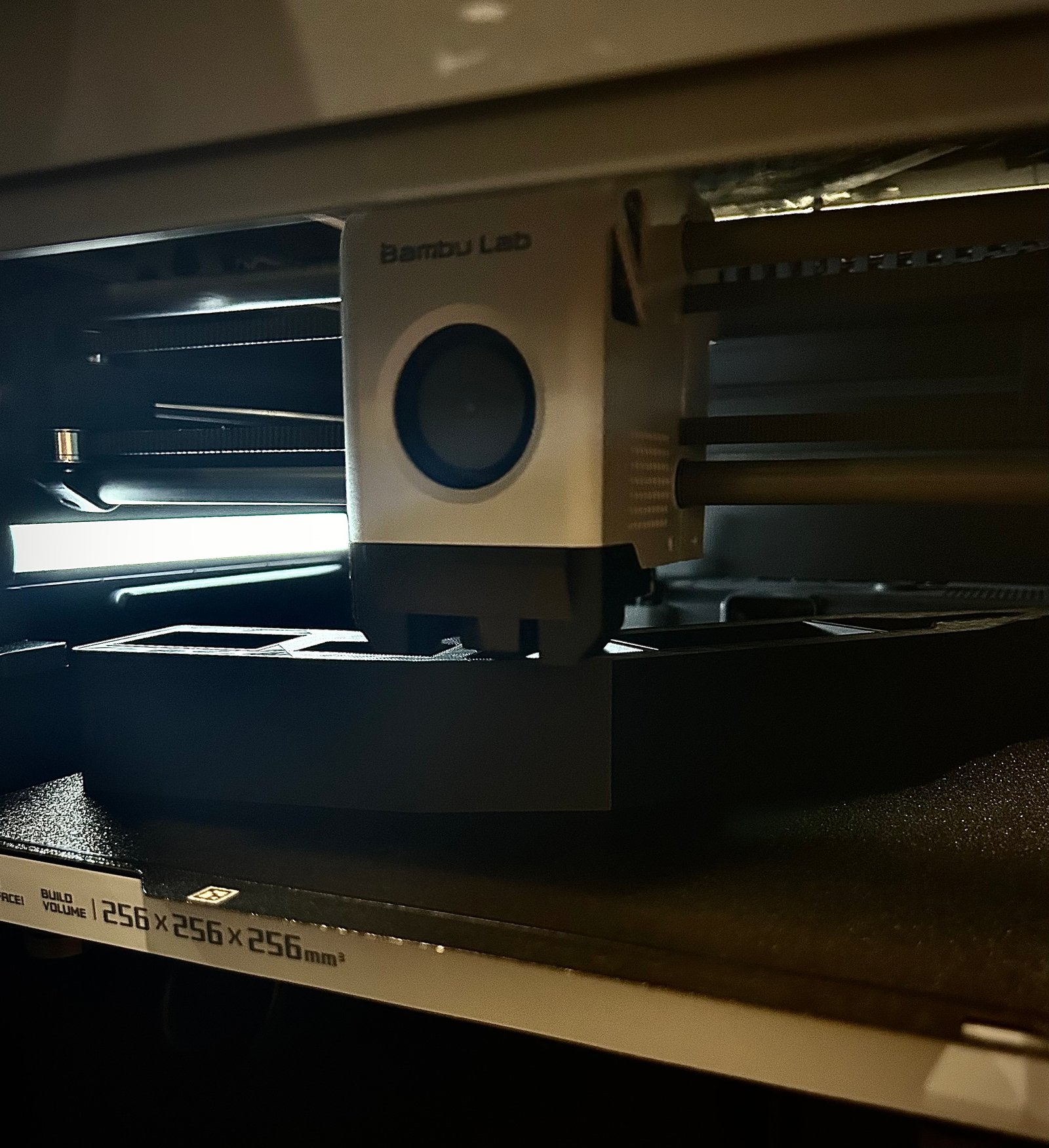
The cost of all the electrical components, including motor drivers, servomotors, DC-DC buck converters, heat sinks, sensors, Raspberry Pi v4, AWG cores, and 3S, LiPo Battery, amounted to around $350. However, I spent my first year summer on campus in order to use the resources from our labs saving lots of money on parts like filament, screws, bolts, nuts, bearings, AWG cores and other manufacturing tools. The CAD components were designed in Fusion 360 and printed mostly using a Bambu Lab X1 printer. The print settings were adjusted in Bambu Studio to ensure high-quality results. After printing, I assembled everything by positioning each component accordingly to the servo and screw placements designed in my CAD, soldering and connecting them all to the electrical devices in the mainframe before I started coding.