Justin Yu

For our Engineering Design course, we were tasked with creating a mechanically actuated device for a semester long project, which my team and I chose to design an automated pill dispenser. The metrics of our design focused on constructing a compact, user-friendly automatic medication dispenser with visual and auditory reminders, ensuring timely doses for elderly and disabled users.

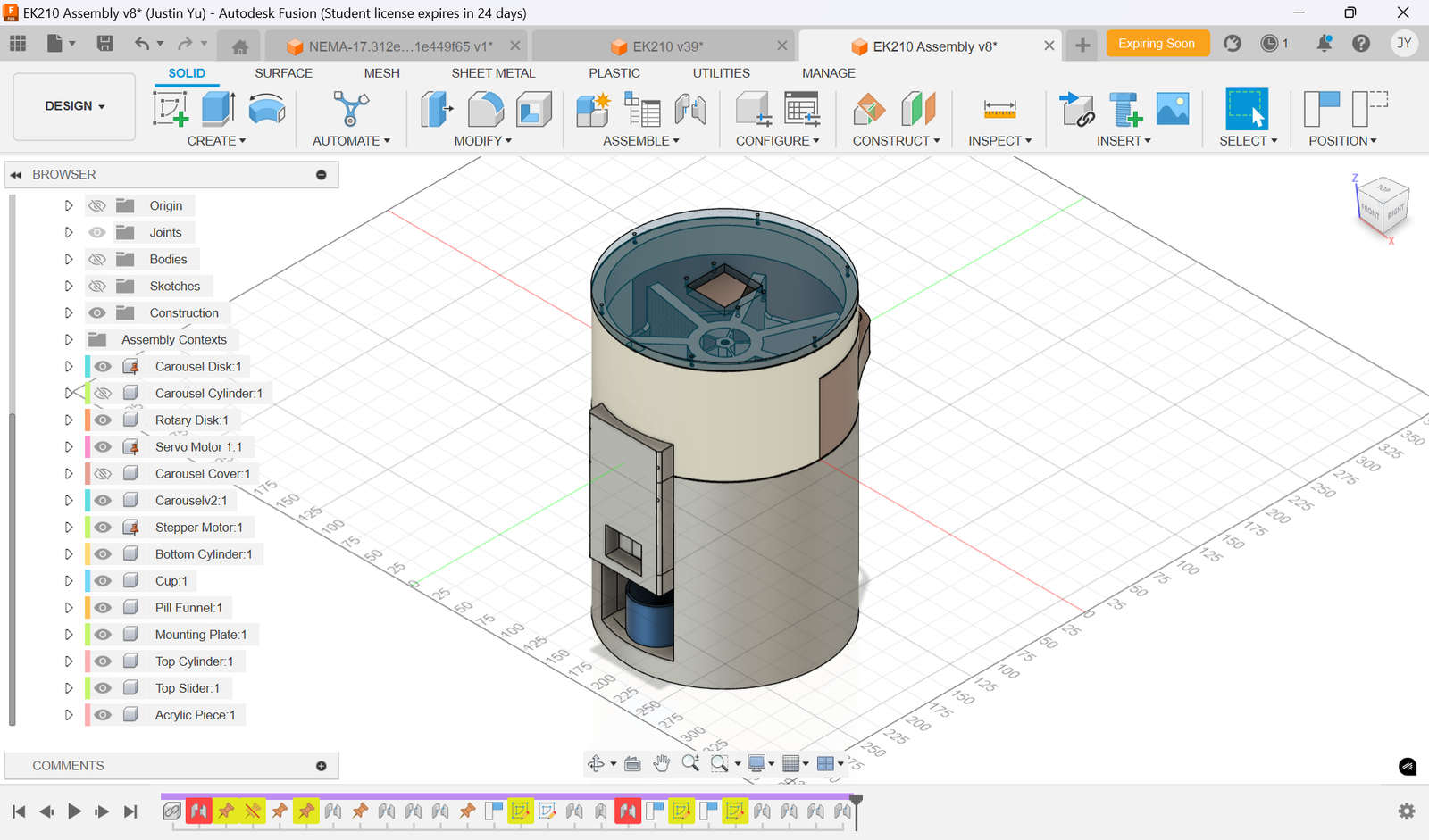
In creating the 3D CAD model for our pill dispenser, I used Fusion 360 to design and simulate the mechanical components and actuation mechanisms. The dispenser consists of a rotating carousel with slots where the pills are compartmentalized and a double rotary disk system that dispenses the pills down a funnel. The dispenser is controlled by a microcontroller that incorporates the use of a display screen and a speaker to provide visual and auditory reminders for the user.
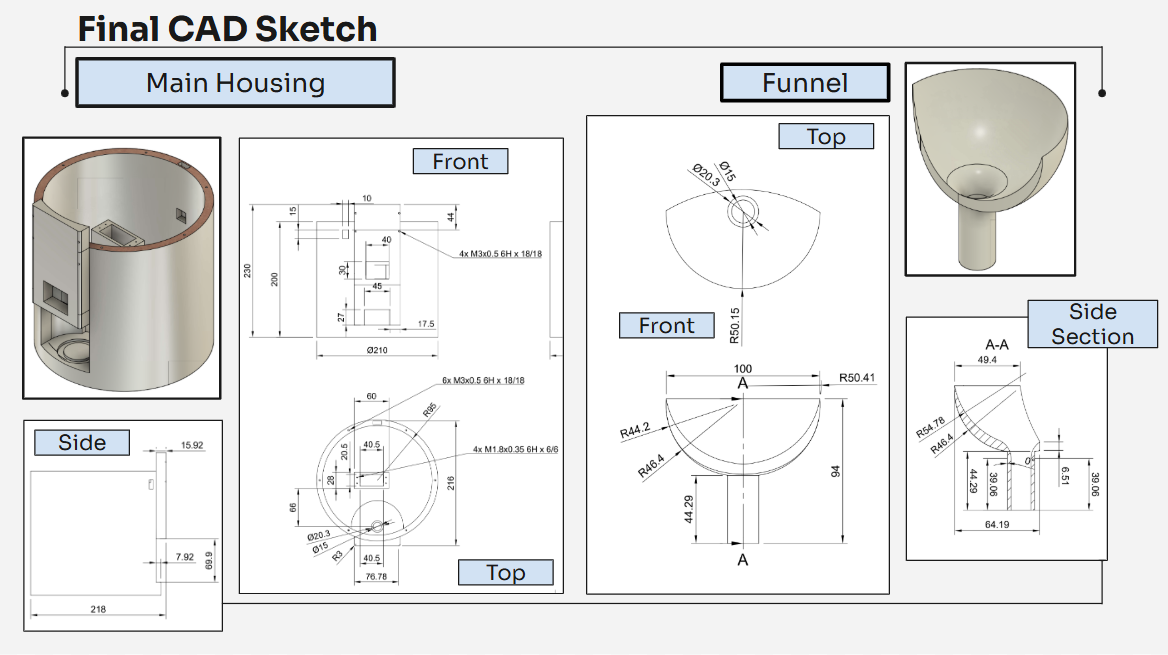

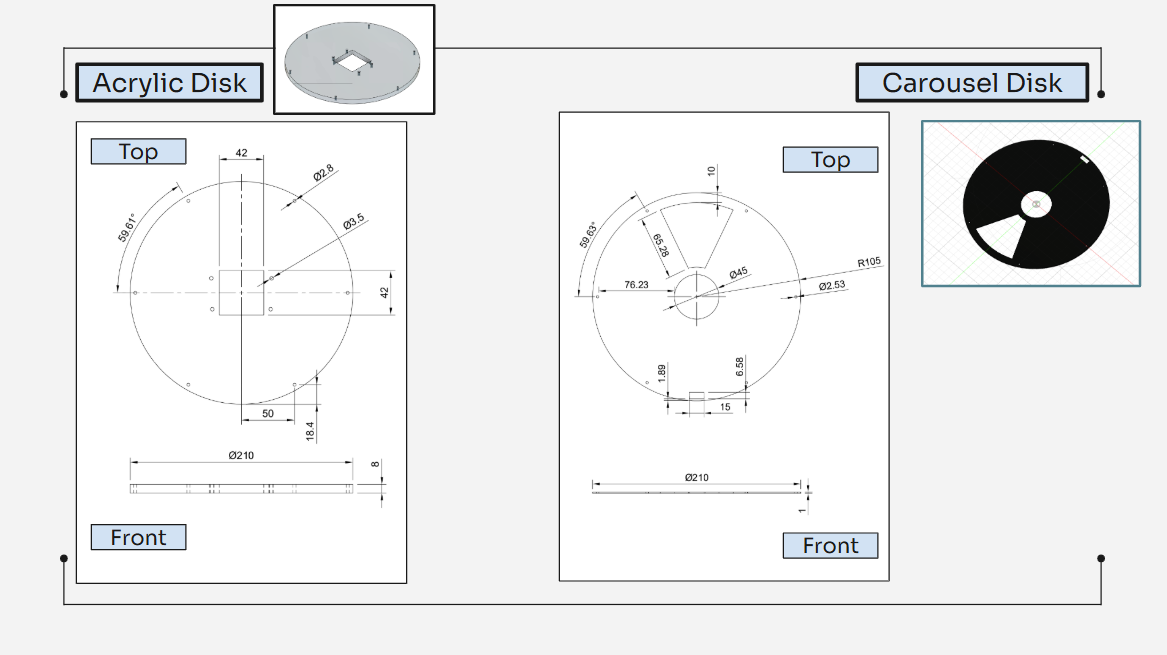
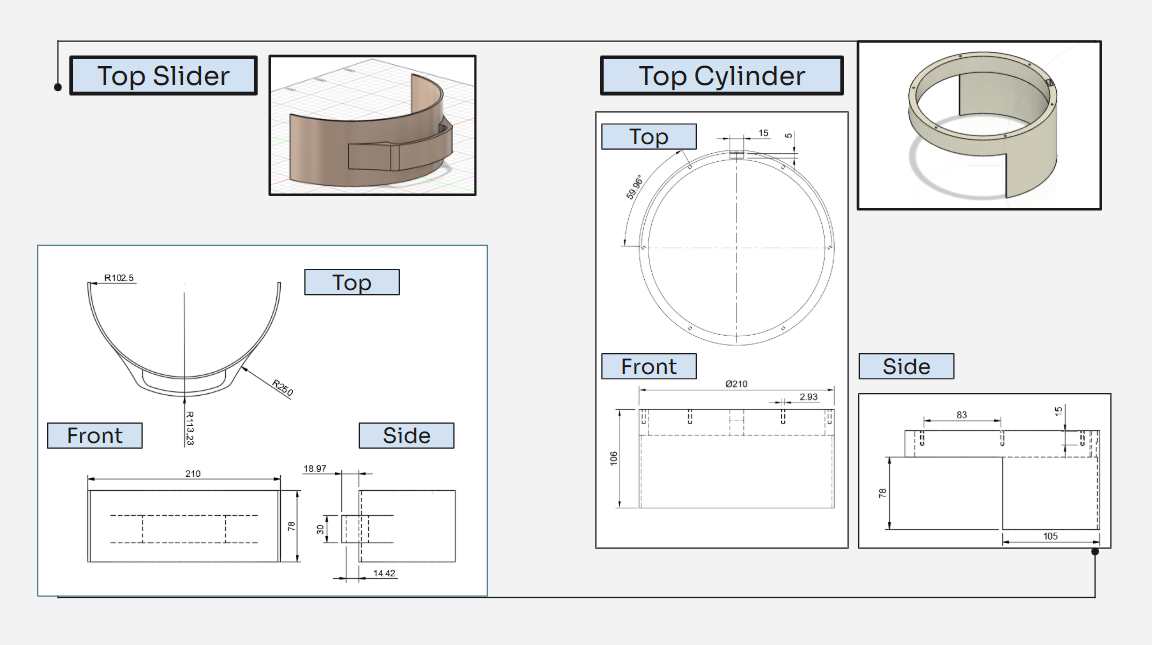
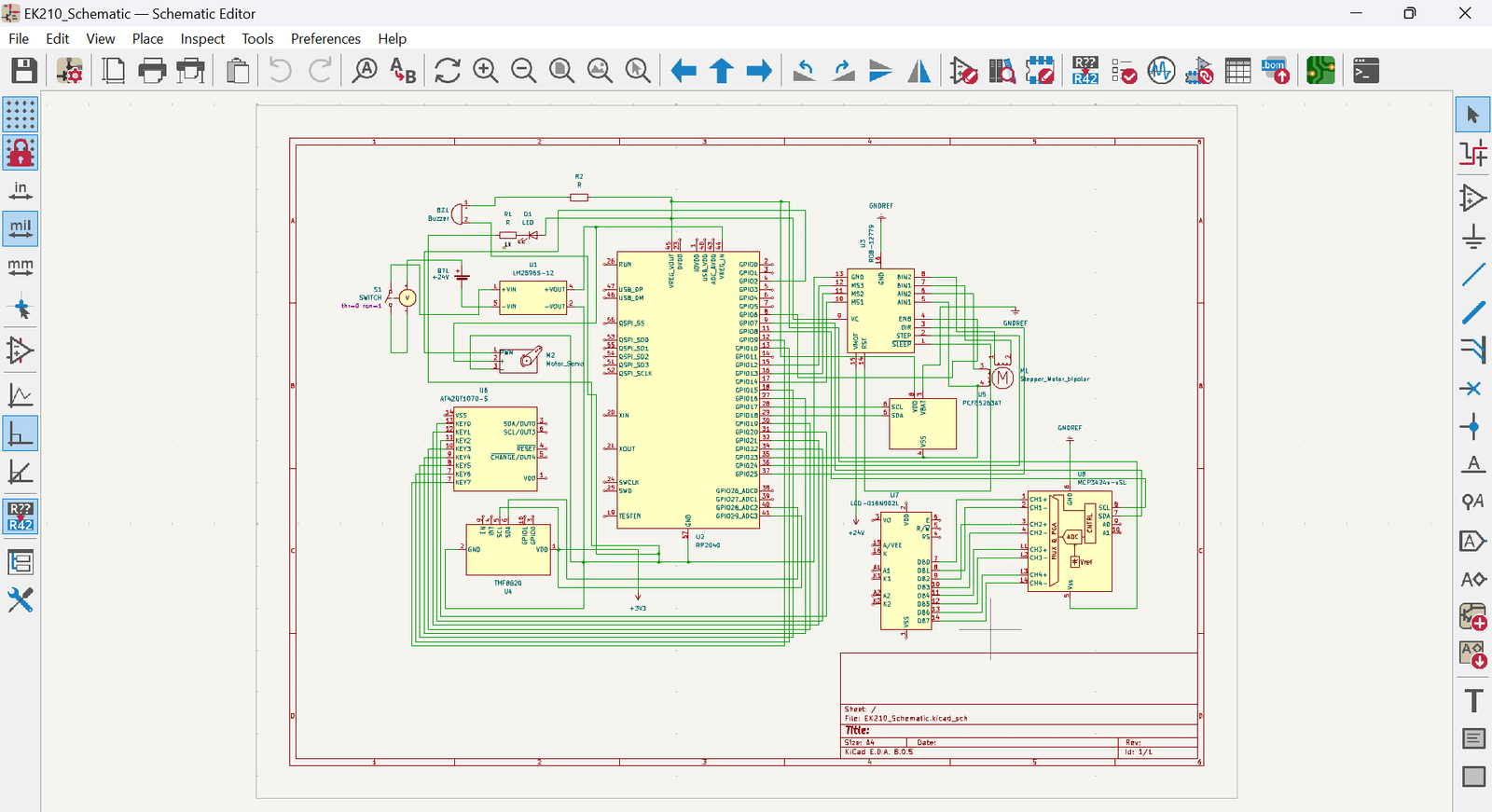
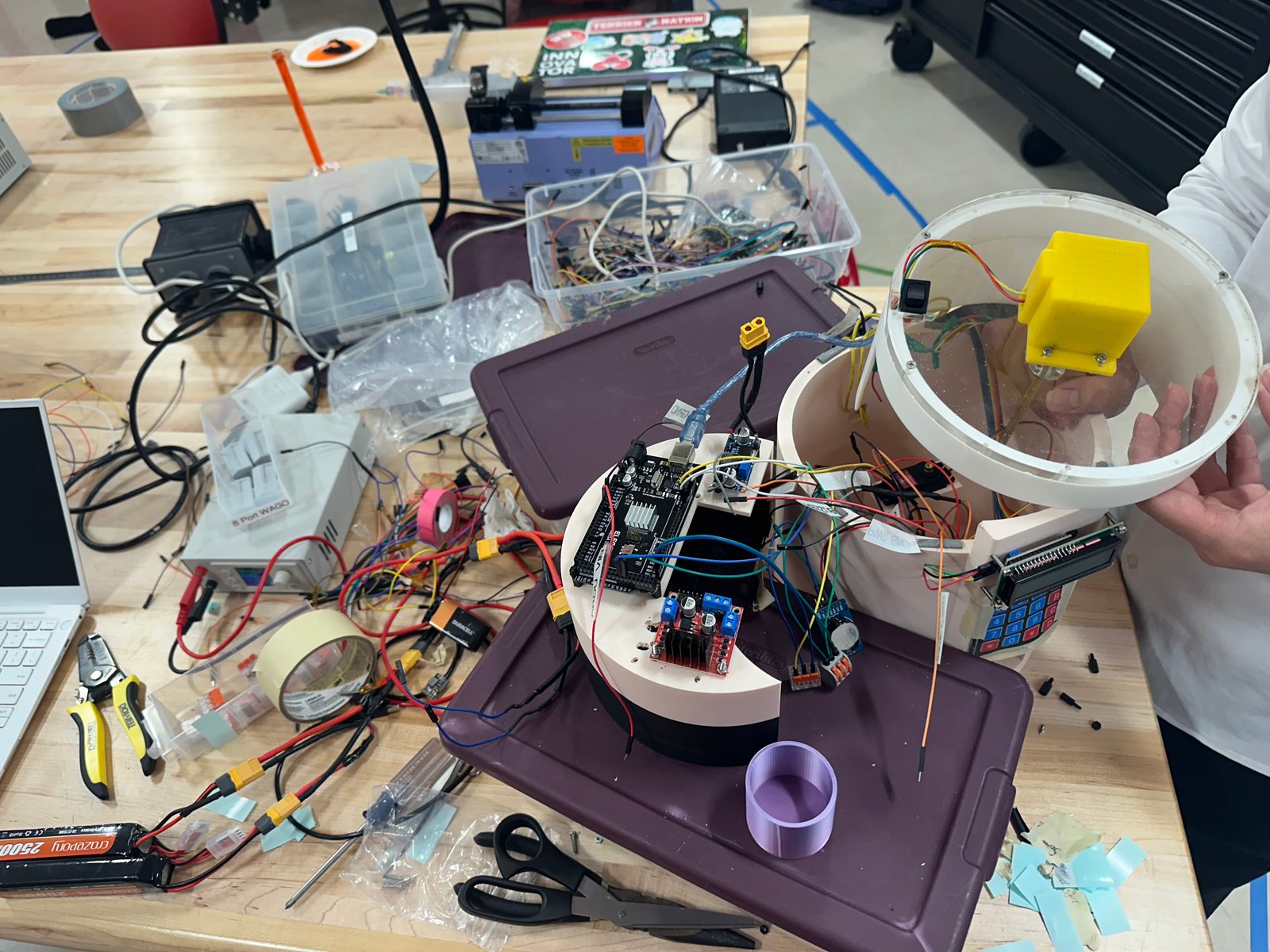
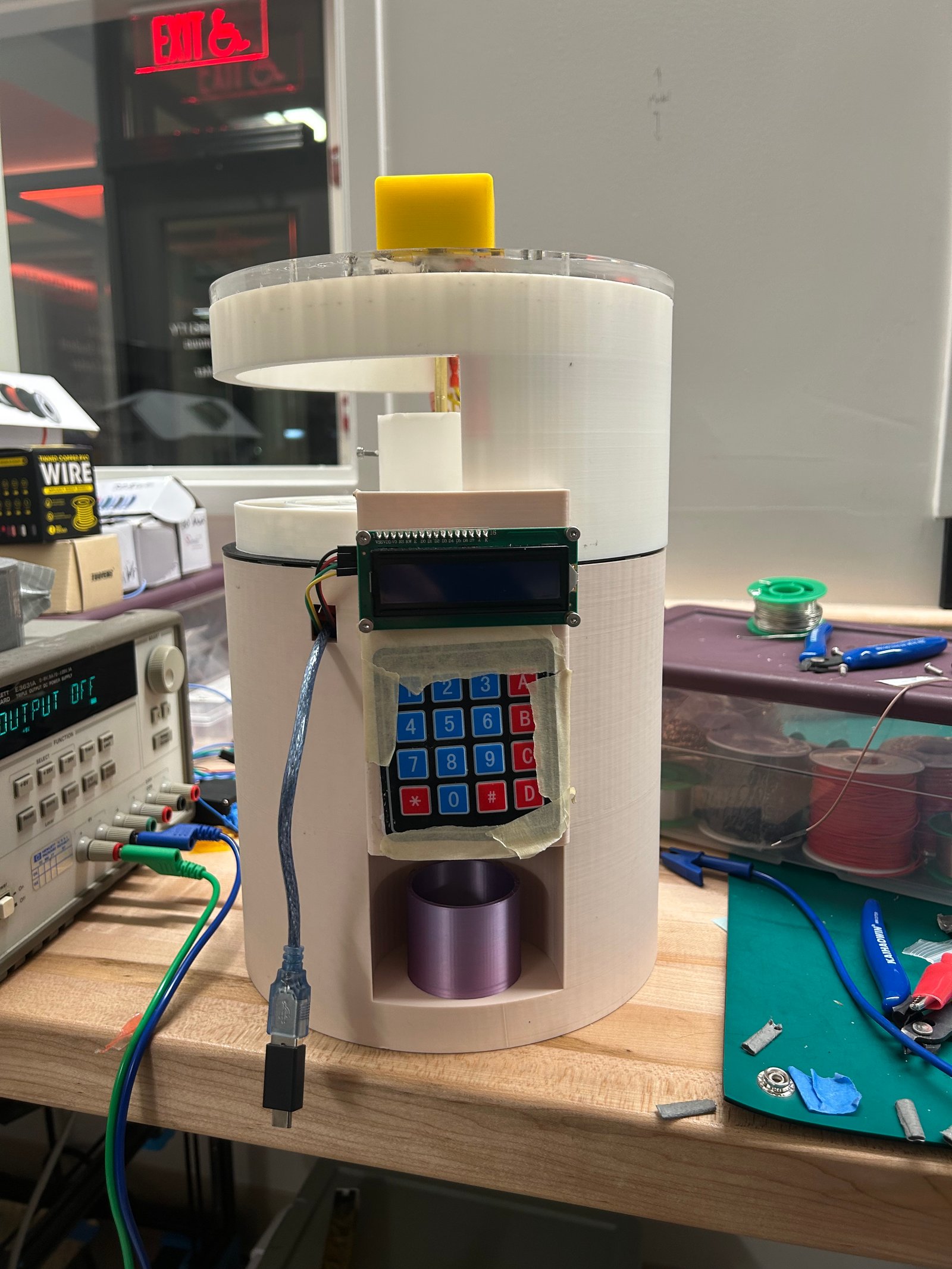
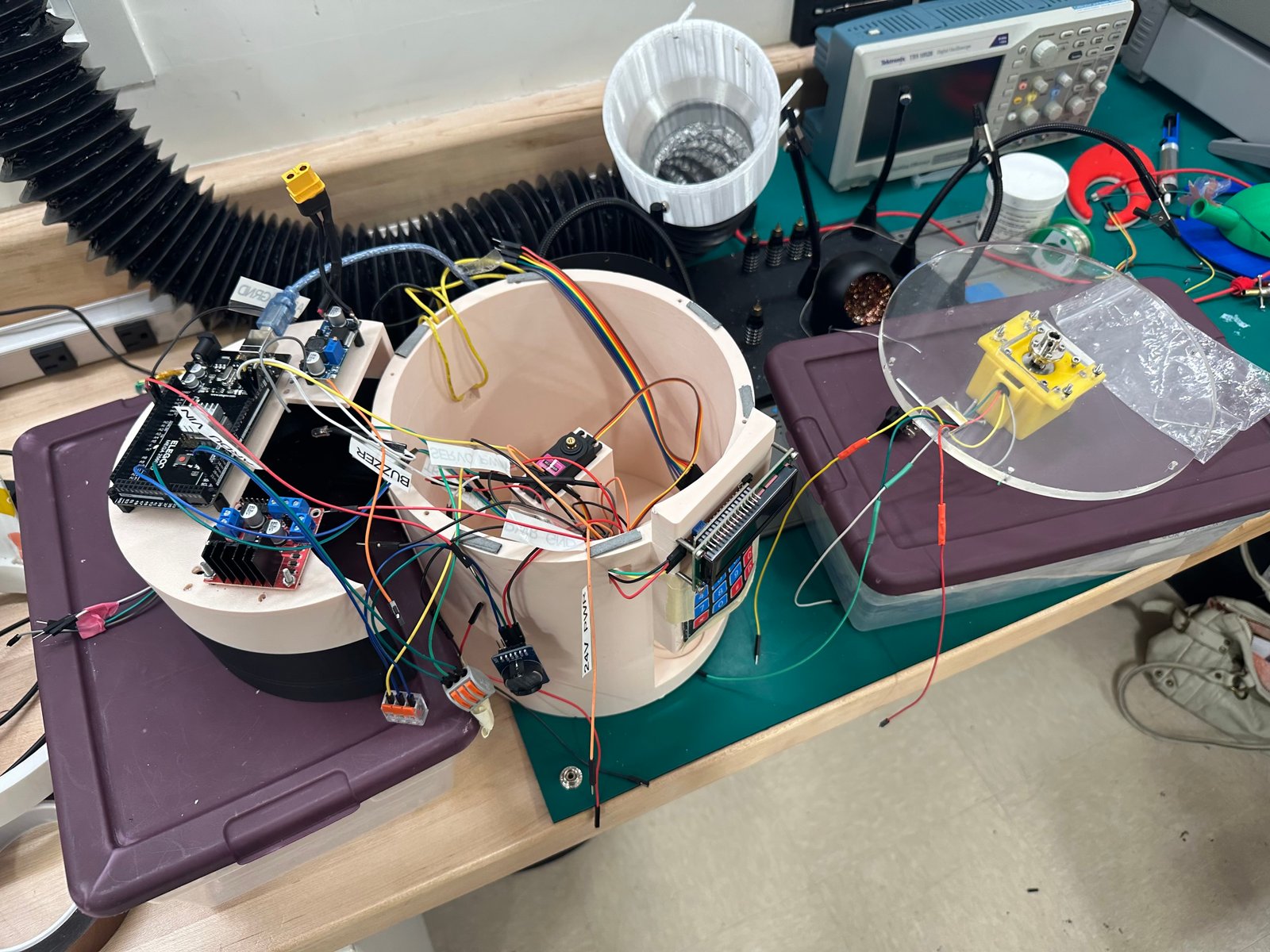

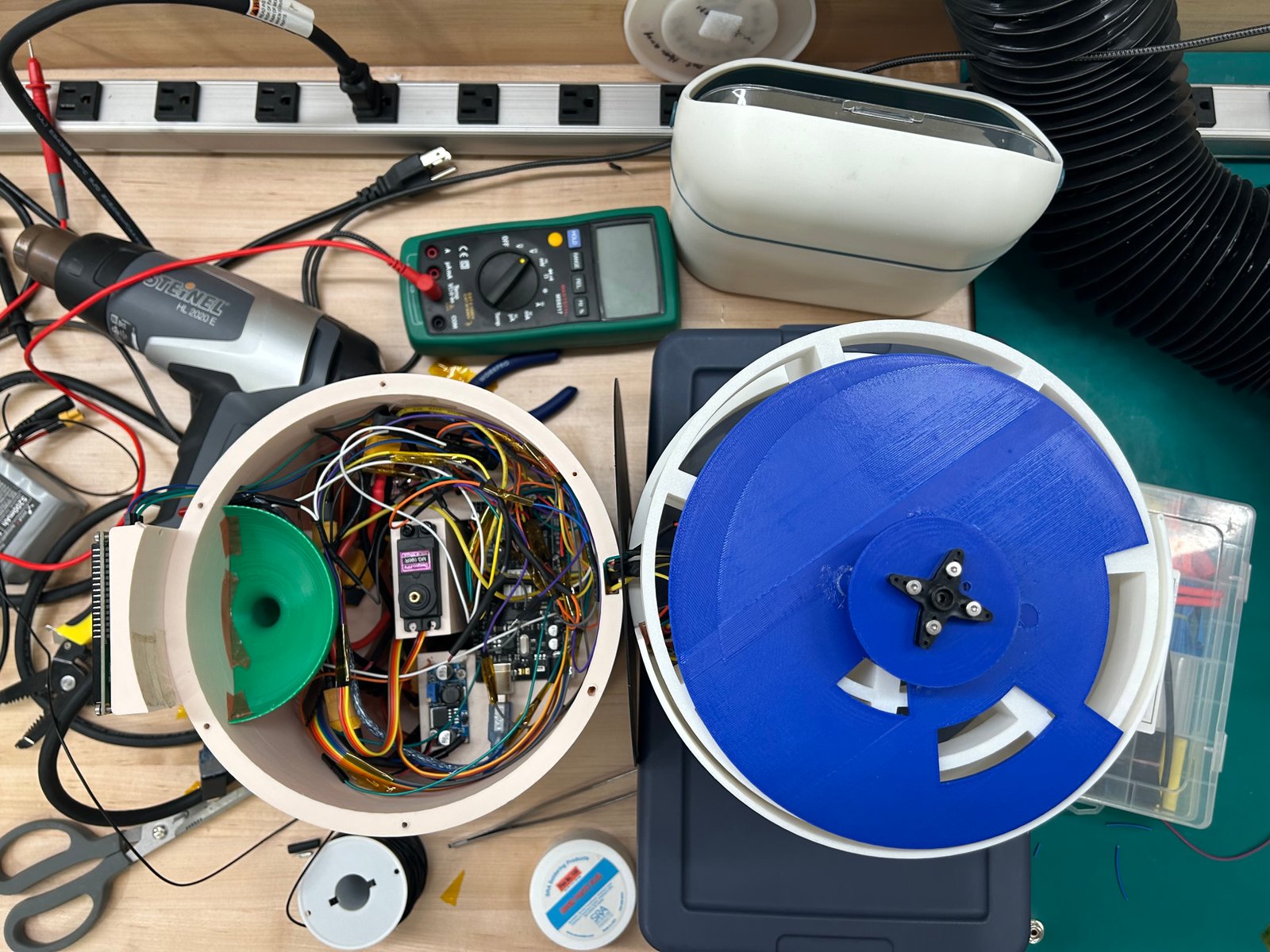


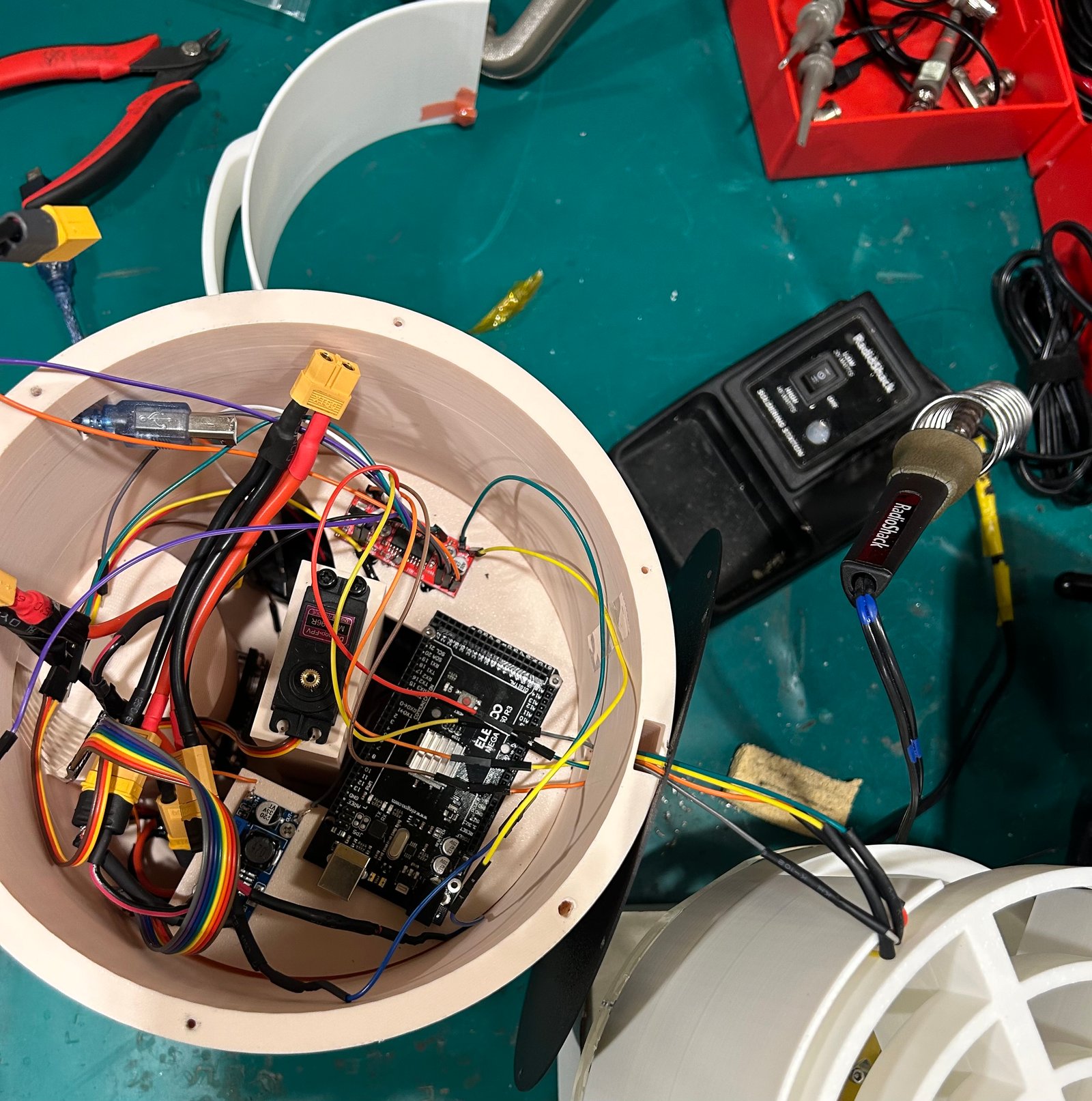

The manufacturing of our product was made using 3D printing, laser cutting, manual-fed machinery, and power tools. The materials used consisted of standard PLA, ABS, and Acrylic. Electrical components include stepper motor, servo motor, motor drivers, voltage regulators, ultrasonic sensor, Keypad, and a few others. For powering our device, we decided to use two lithium batteries connected to a switch, but for a more realistic design, I would redesign this product so that it would be power through an outlet cable. Learning from the difficulties regarding the circuitry, I acknowledged the benefits of designing my own PCB for the purpose of maintaining more organized wiring and a significantly more compact, smaller design. Other things that I would make room for improvement would be to 3D print cable locks for dupont connections, and redesigning our slider to include slots for the magnets for a more secure fit.
• Unorganized circuitry made it difficult to troubleshoot and identify hurdles and placing other components
• Abrupt issues with dimensonality and alignment of early protoyped parts called for a lot of improvision
• Coding the LCD screen to work in unison with the RTC module and the keypad
• All nighter in the lab together (Irene Skandalakis & Christophe Klein)
• More practice with 3D CAD, particularly Fusion 360
• More practice with Hands-on Engineering and Manufacturing techniques
• Working in an interdisciplinary team, and finding time under the demand of other courses