Overview
This project started as a way to bridge hardware + software through a real, iterative build. The core goal: a reliable hexapod platform that’s easy to tweak mechanically (parametric CAD), easy to assemble, and easy to maintain.
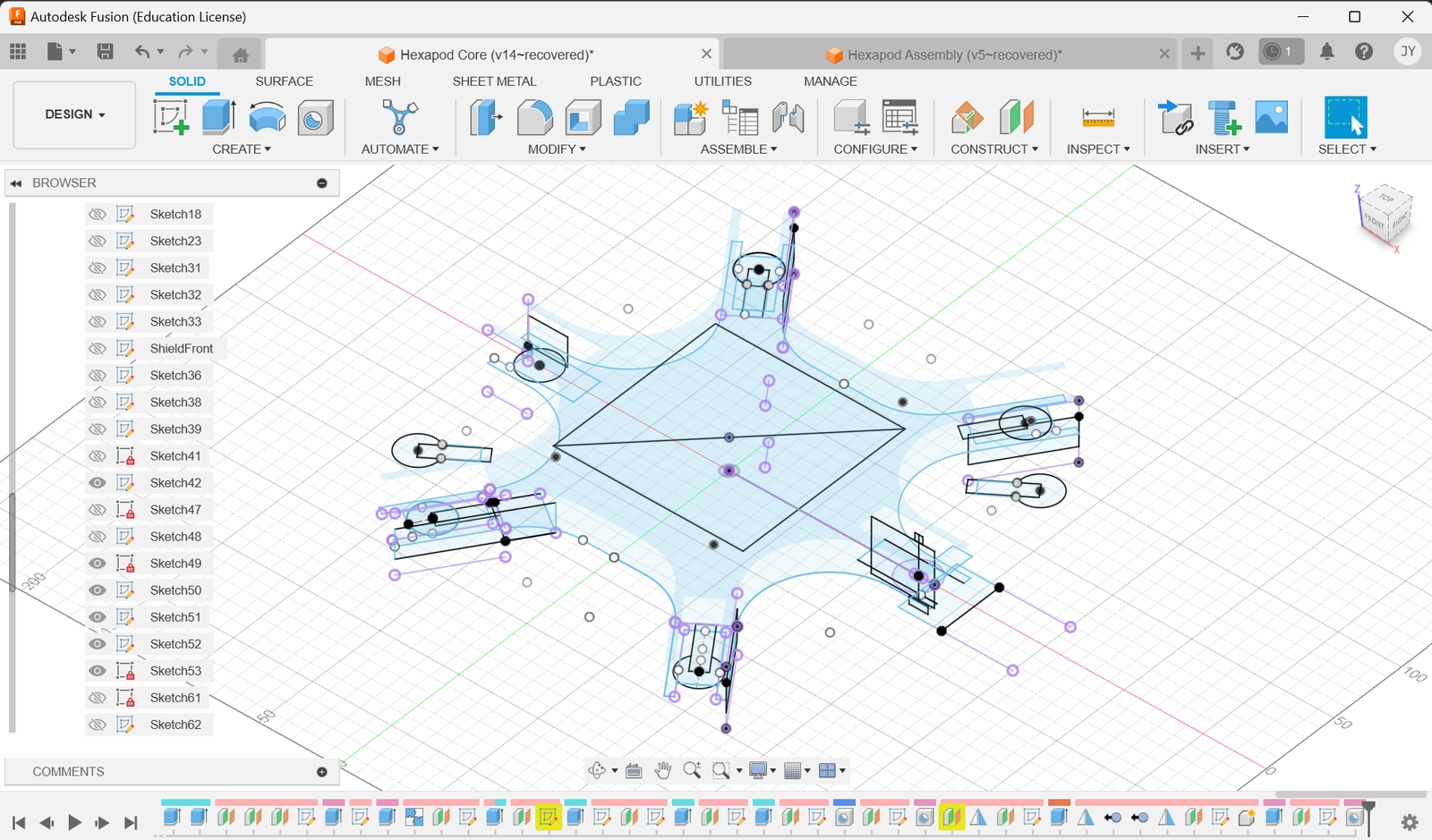
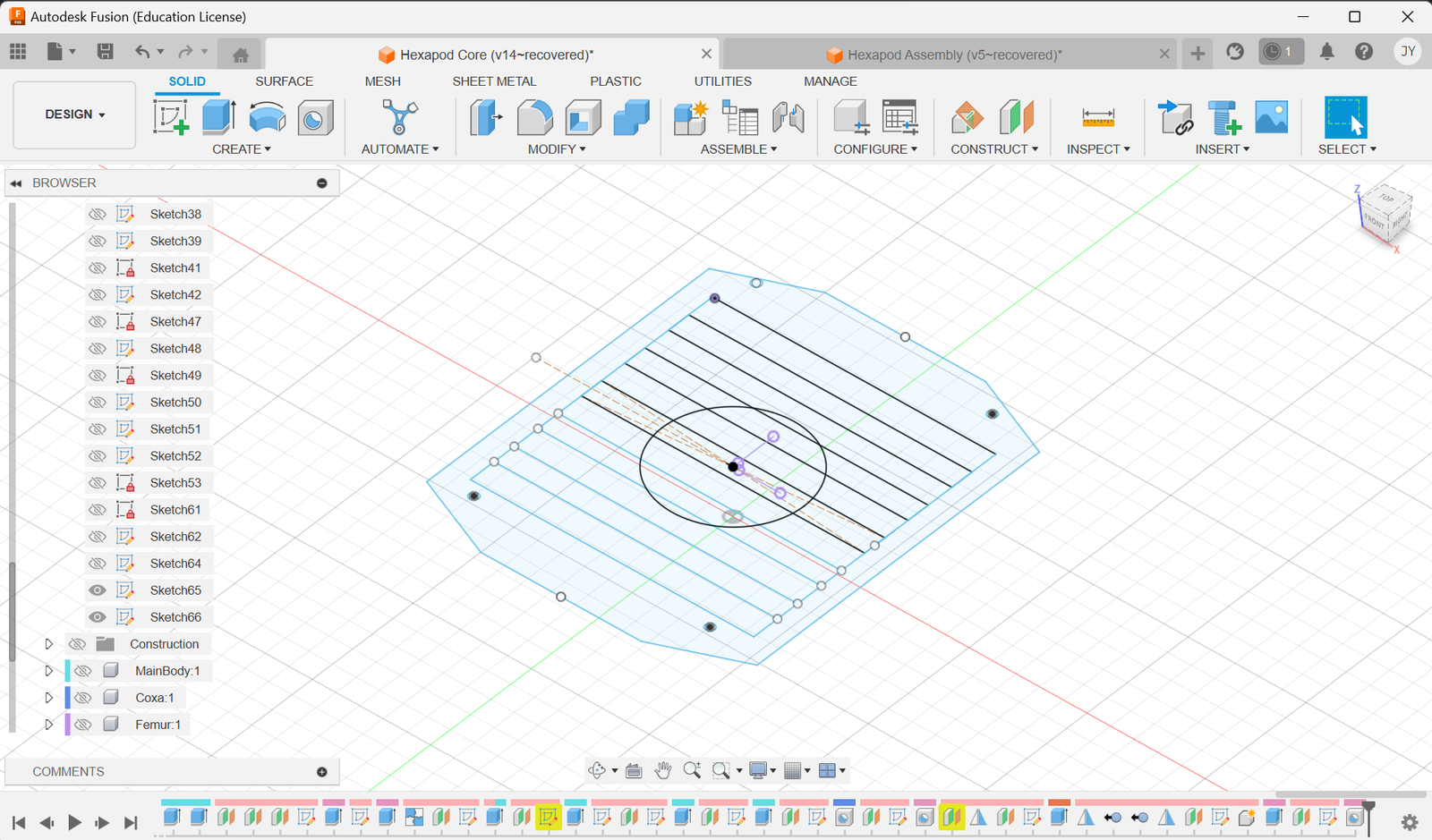
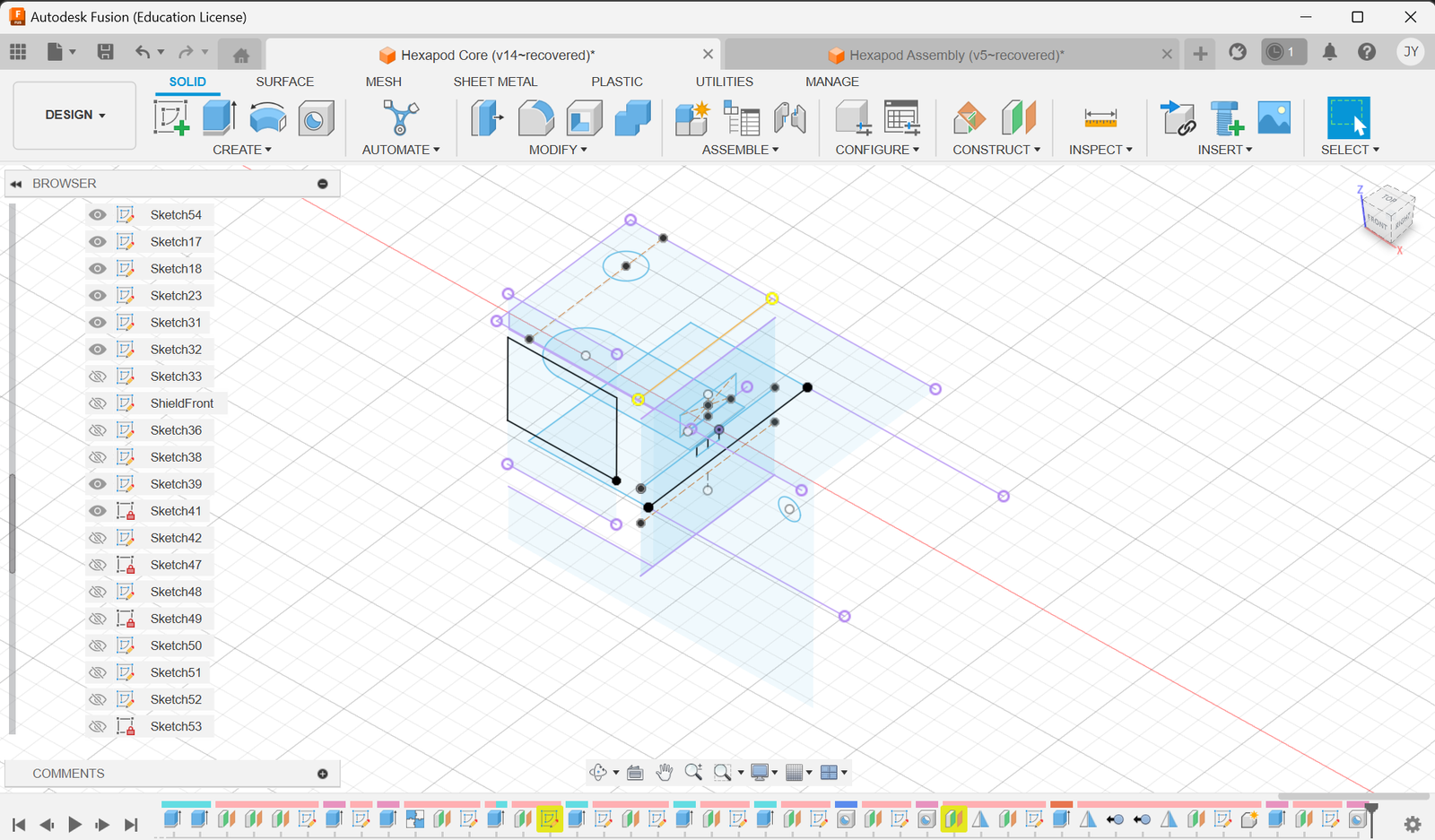
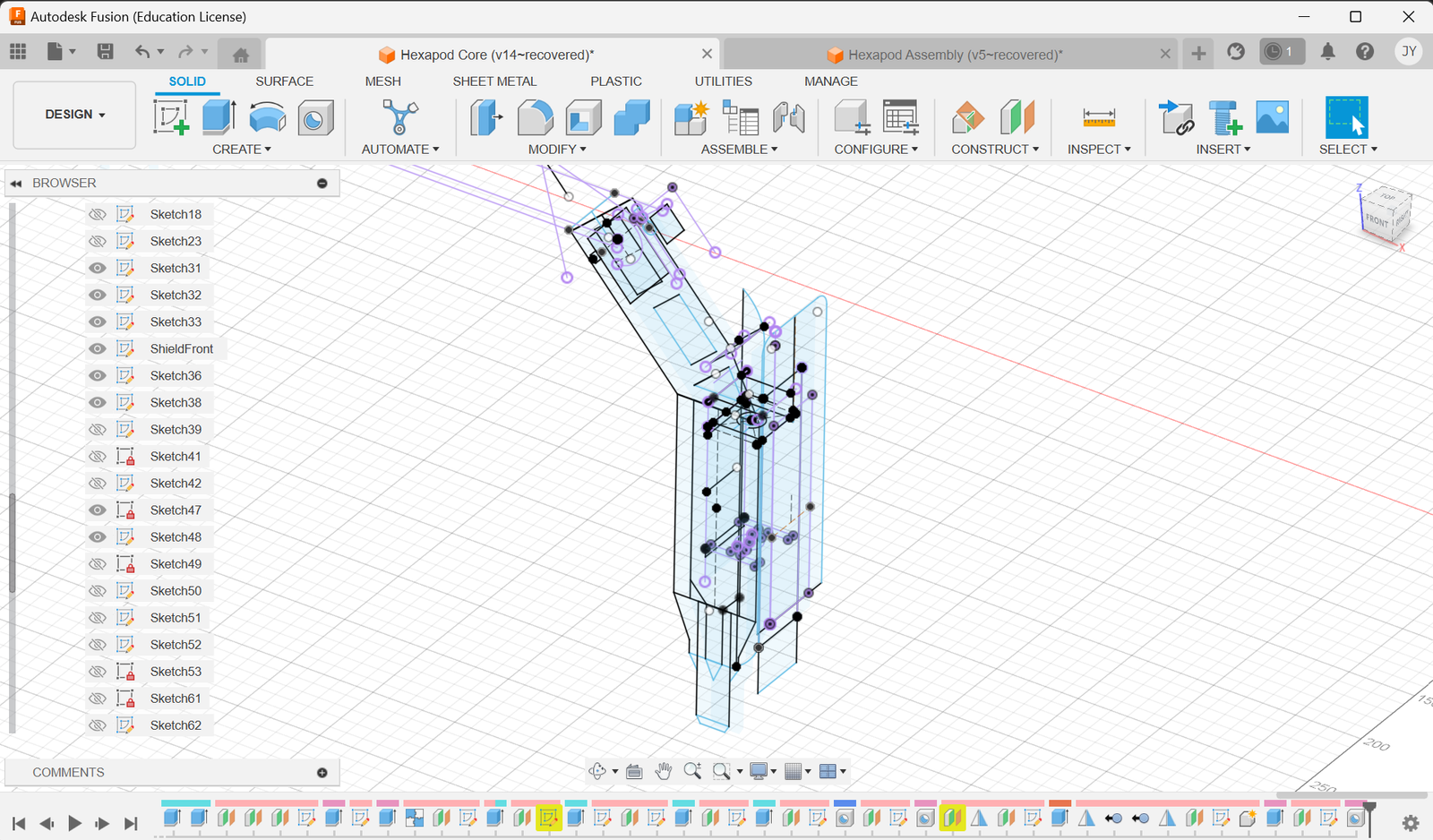
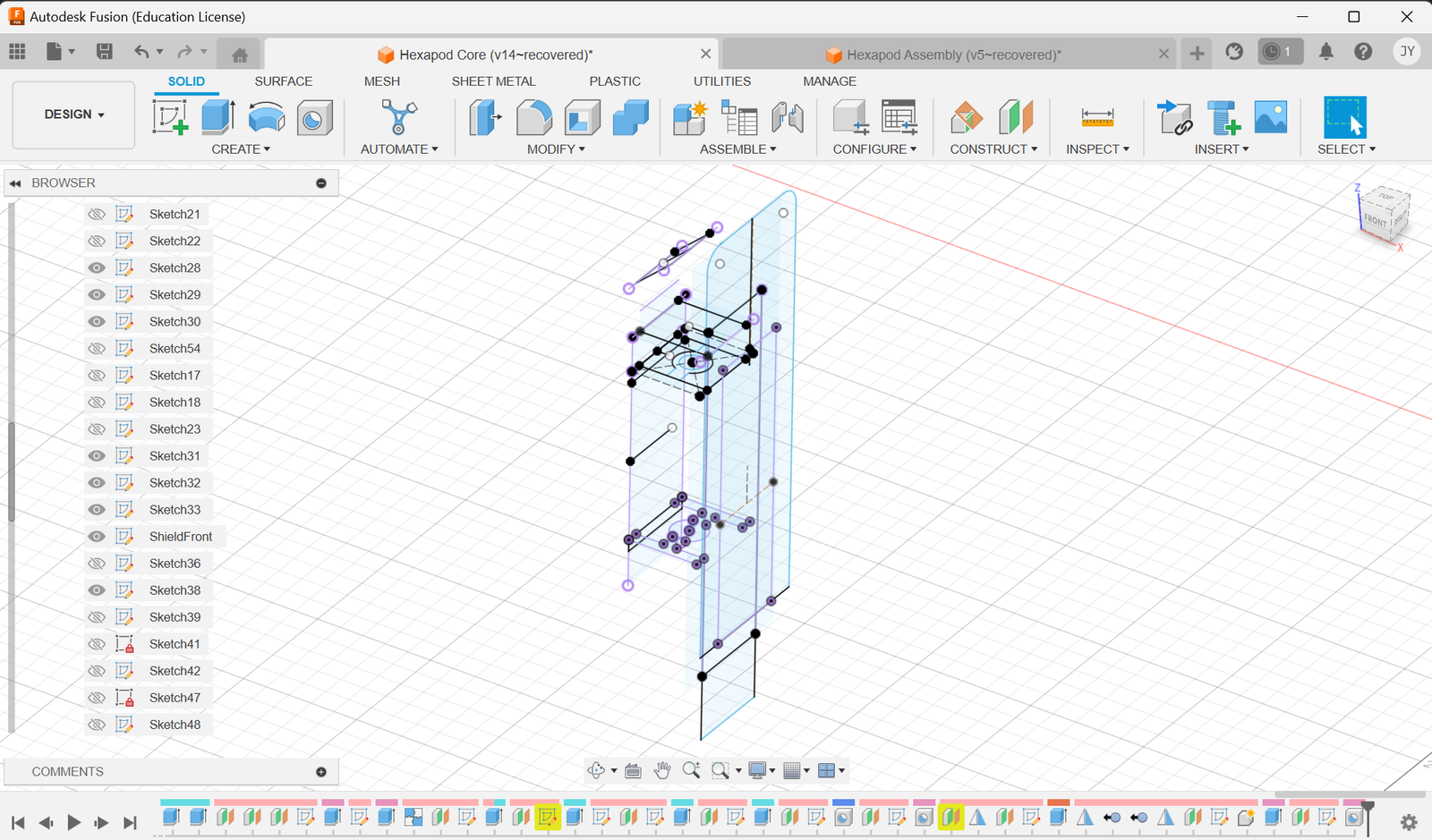
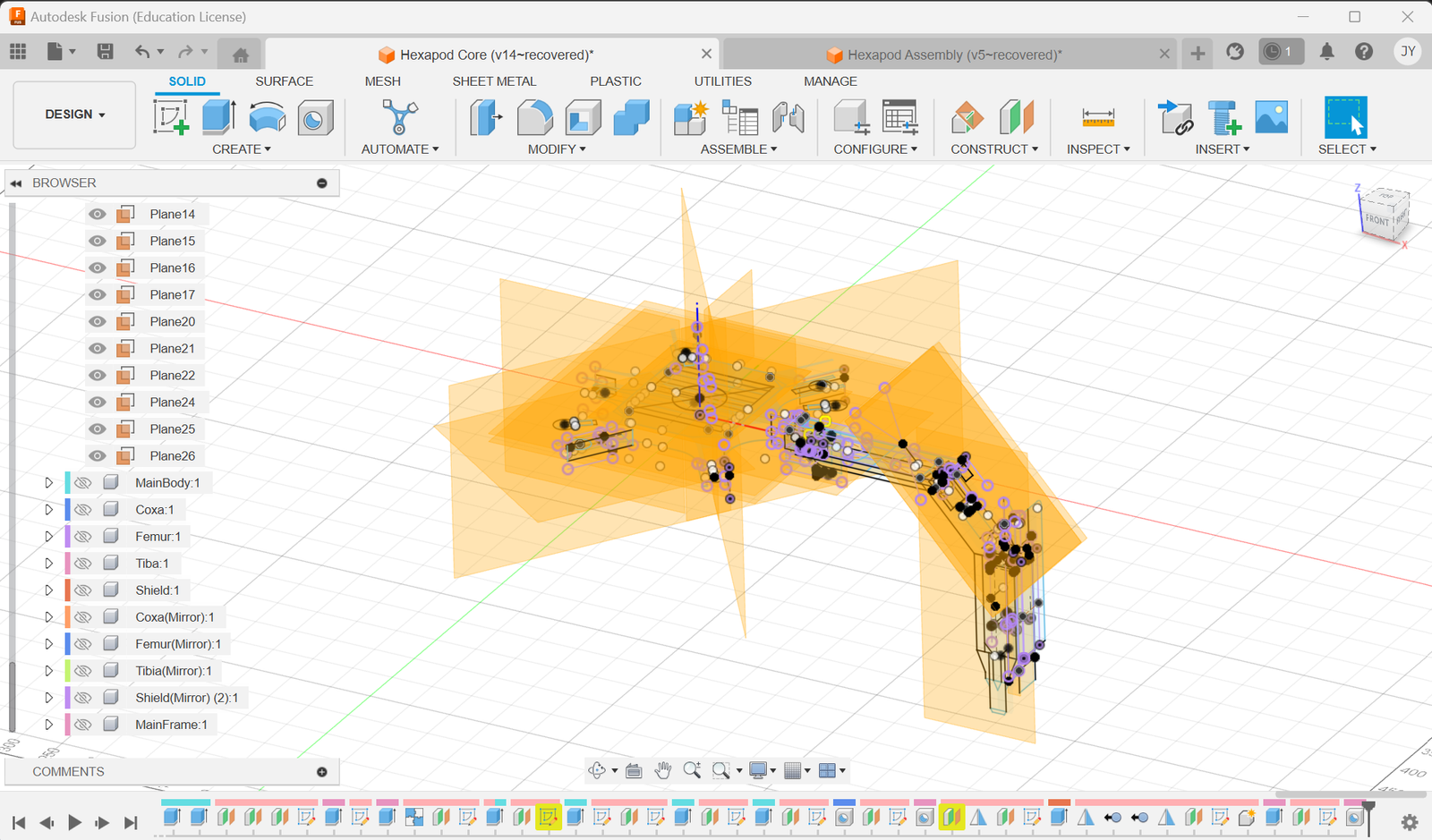
Key idea
Parameter-driven dimensions so servo pockets, leg clearances, and wiring channels can update without rebuilding the whole assembly.
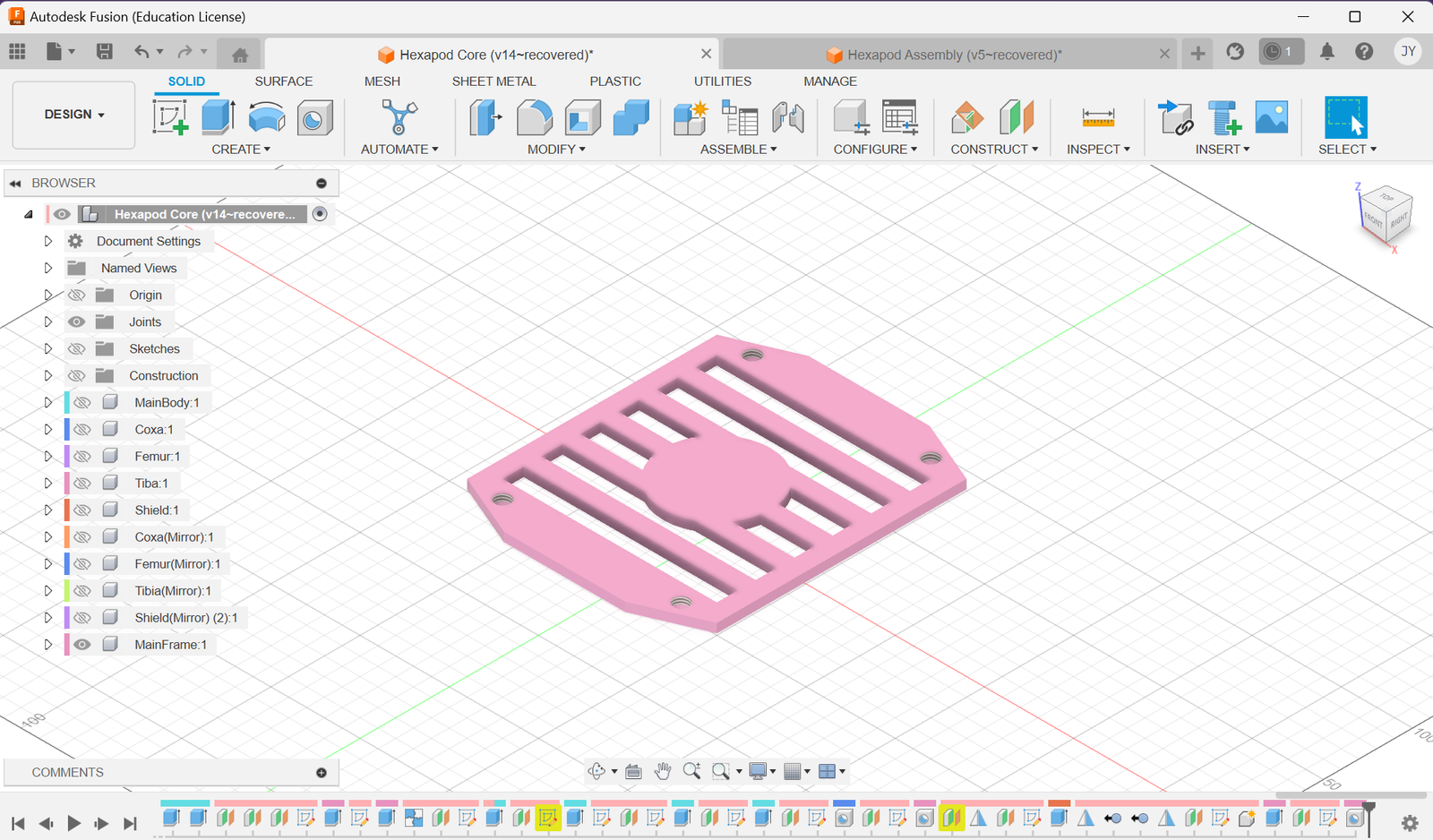
Design priorities
Fit/tolerance, stiffness vs weight, wiring serviceability, and fast revision cycles.
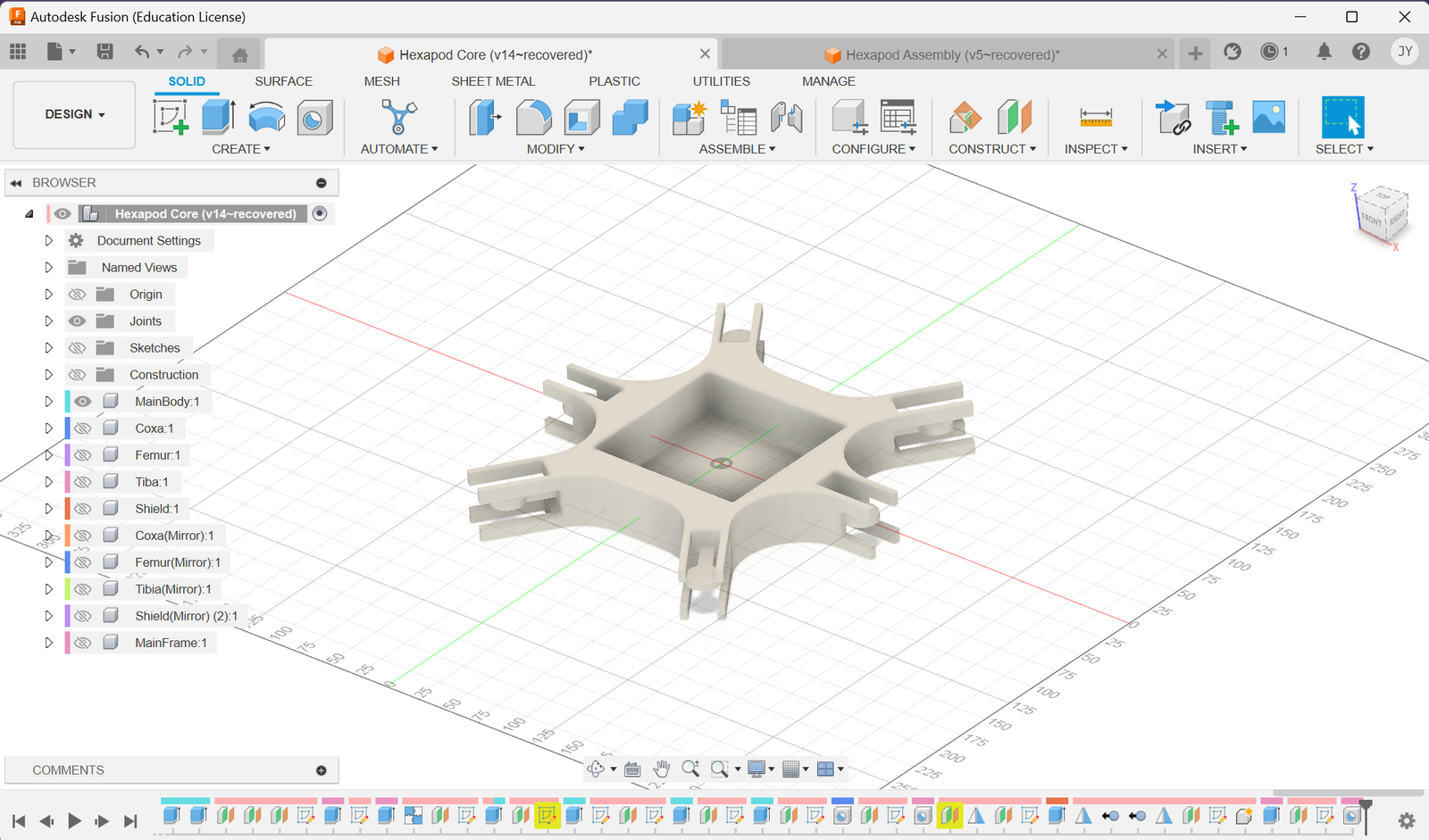
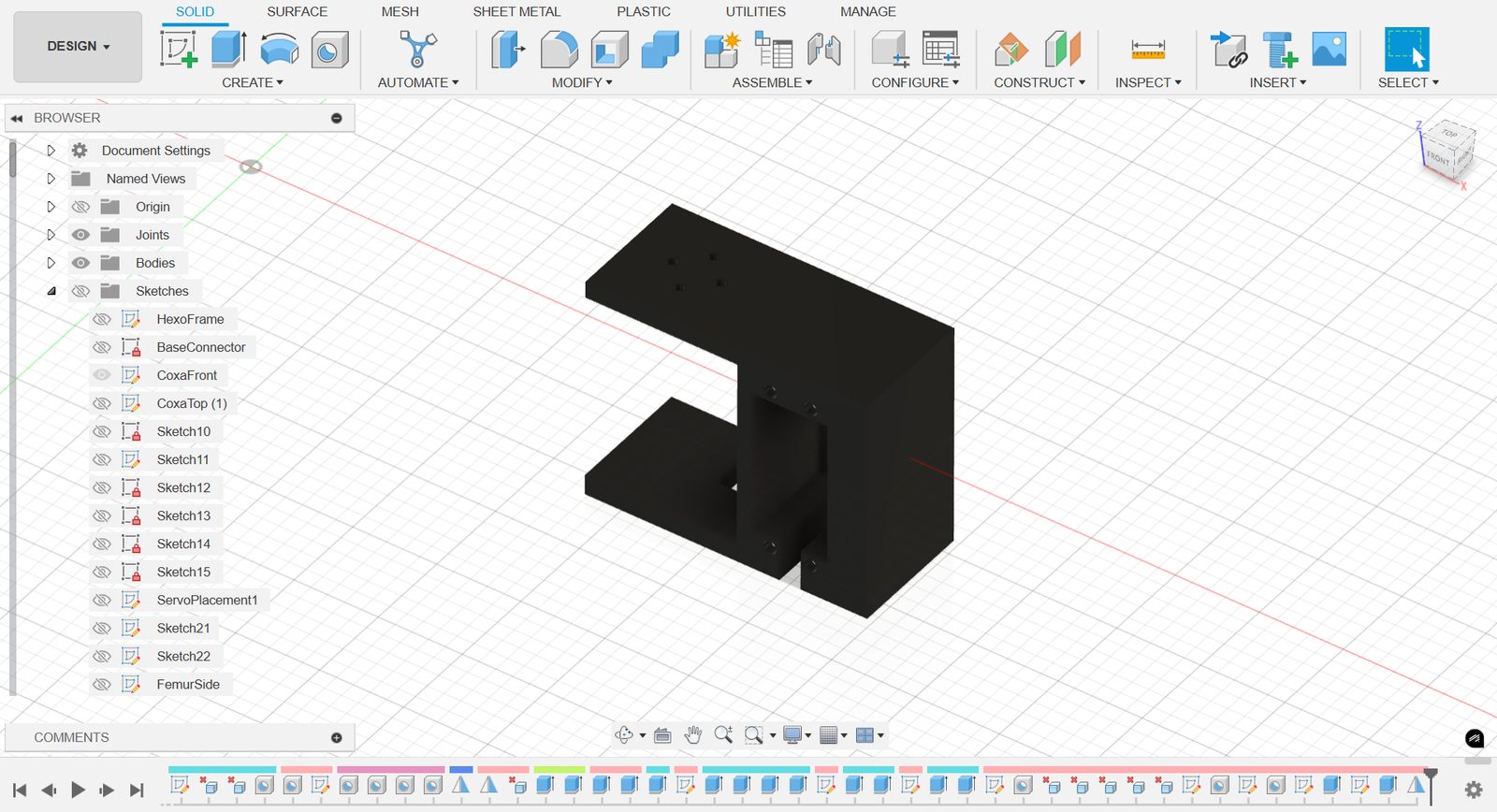
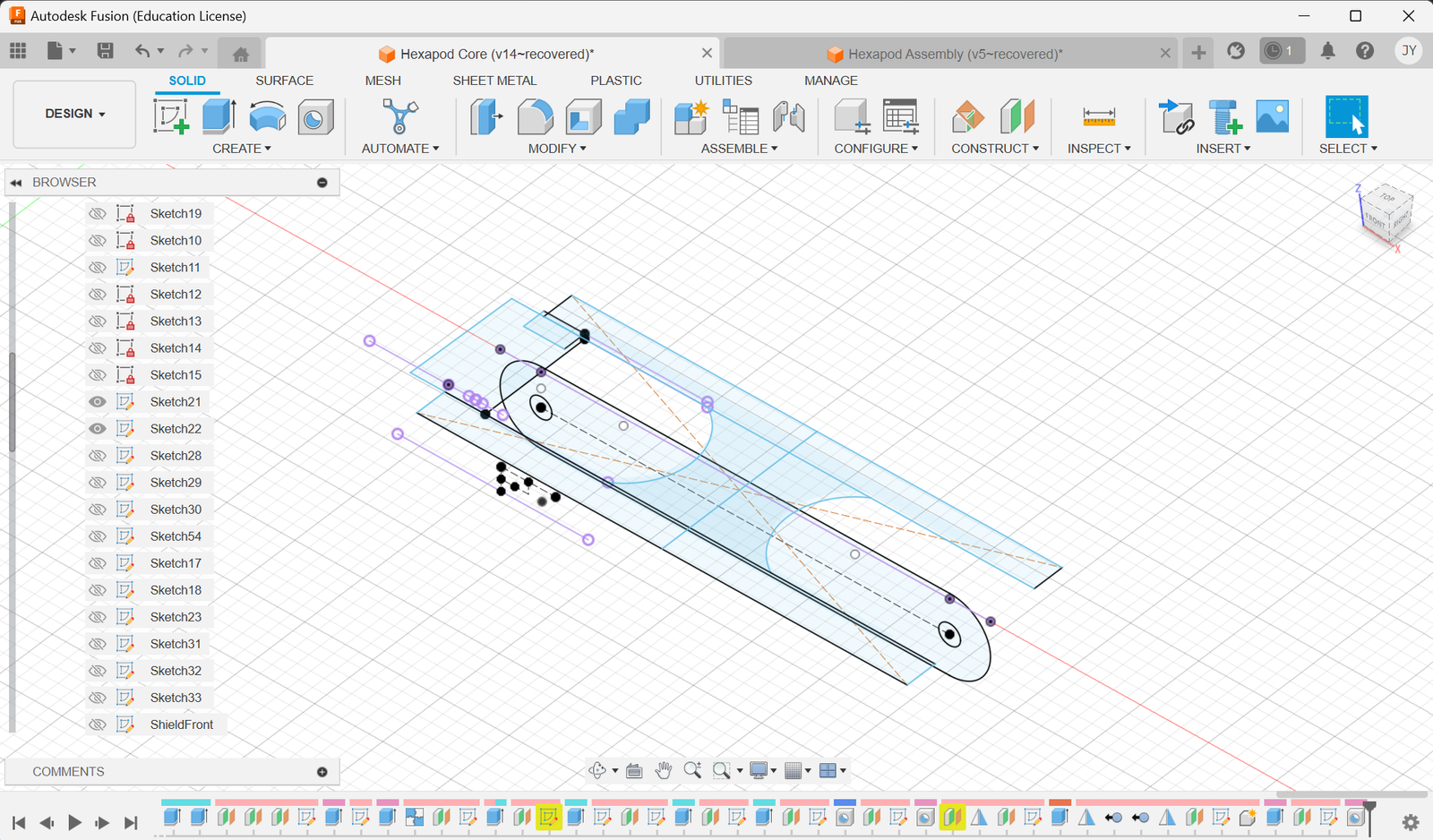
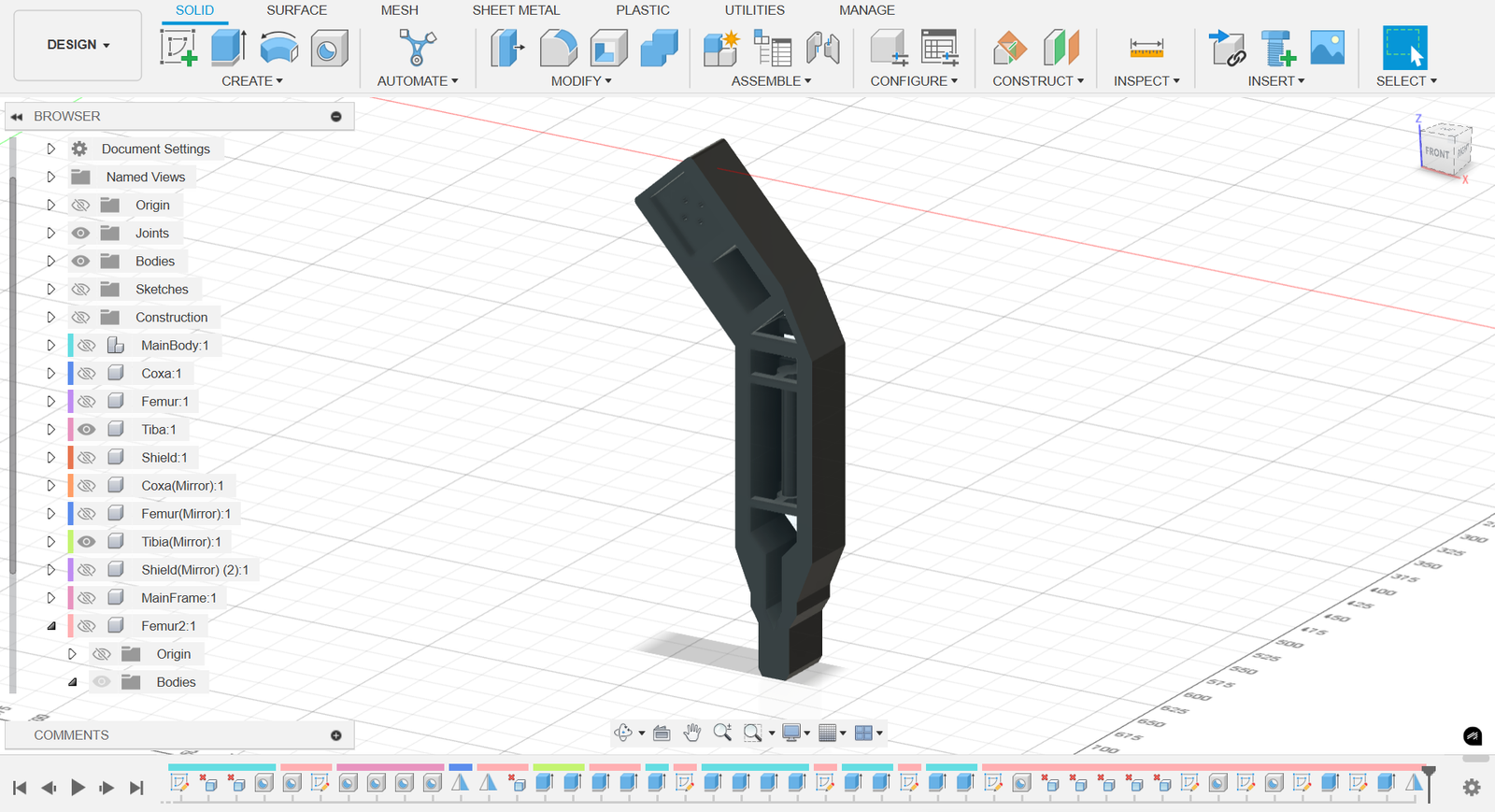
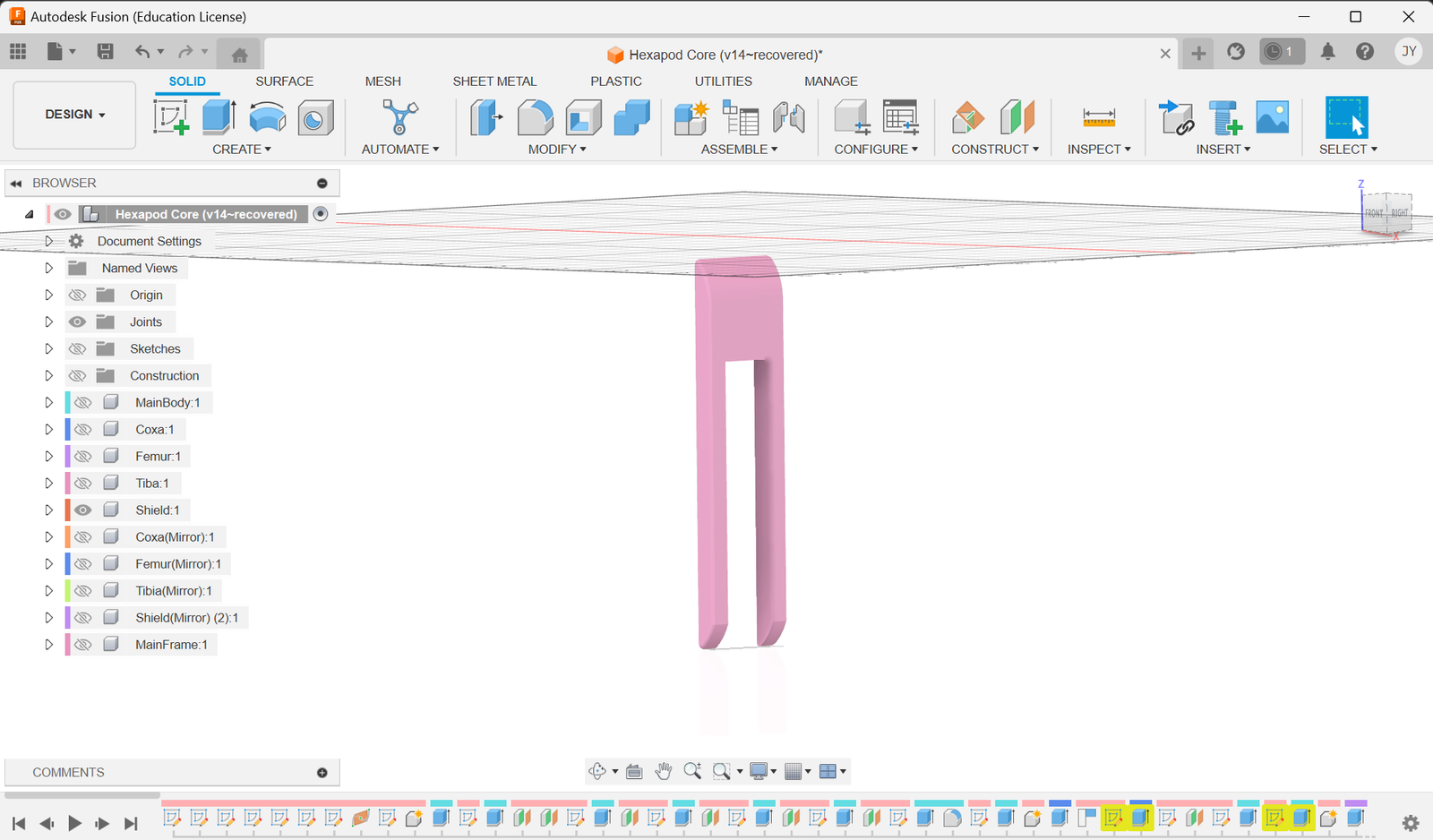
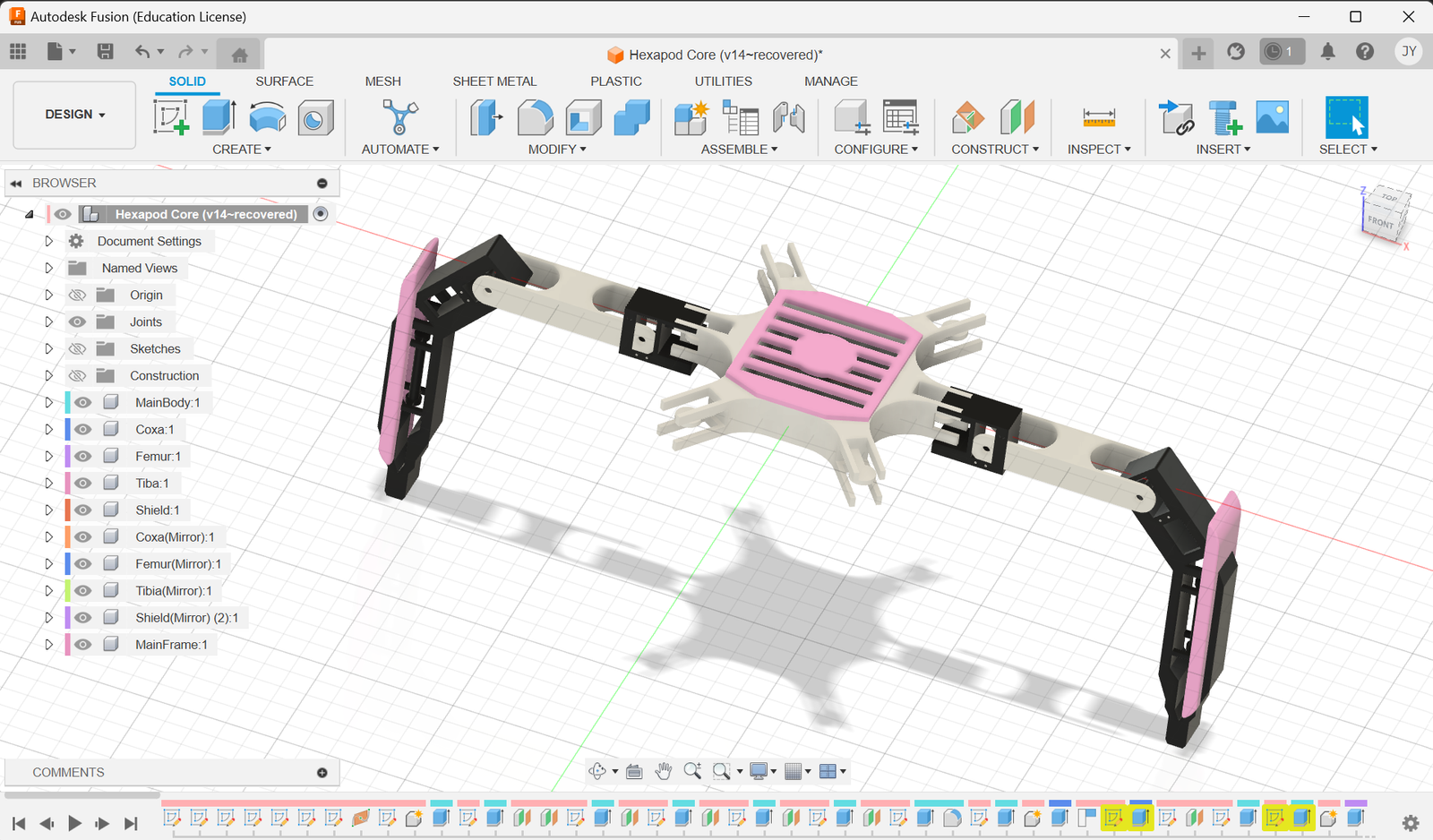
CAD
CAD focused on practical constraints first: servo alignment, fastener access, cable routing, and avoiding interference during gait motion.
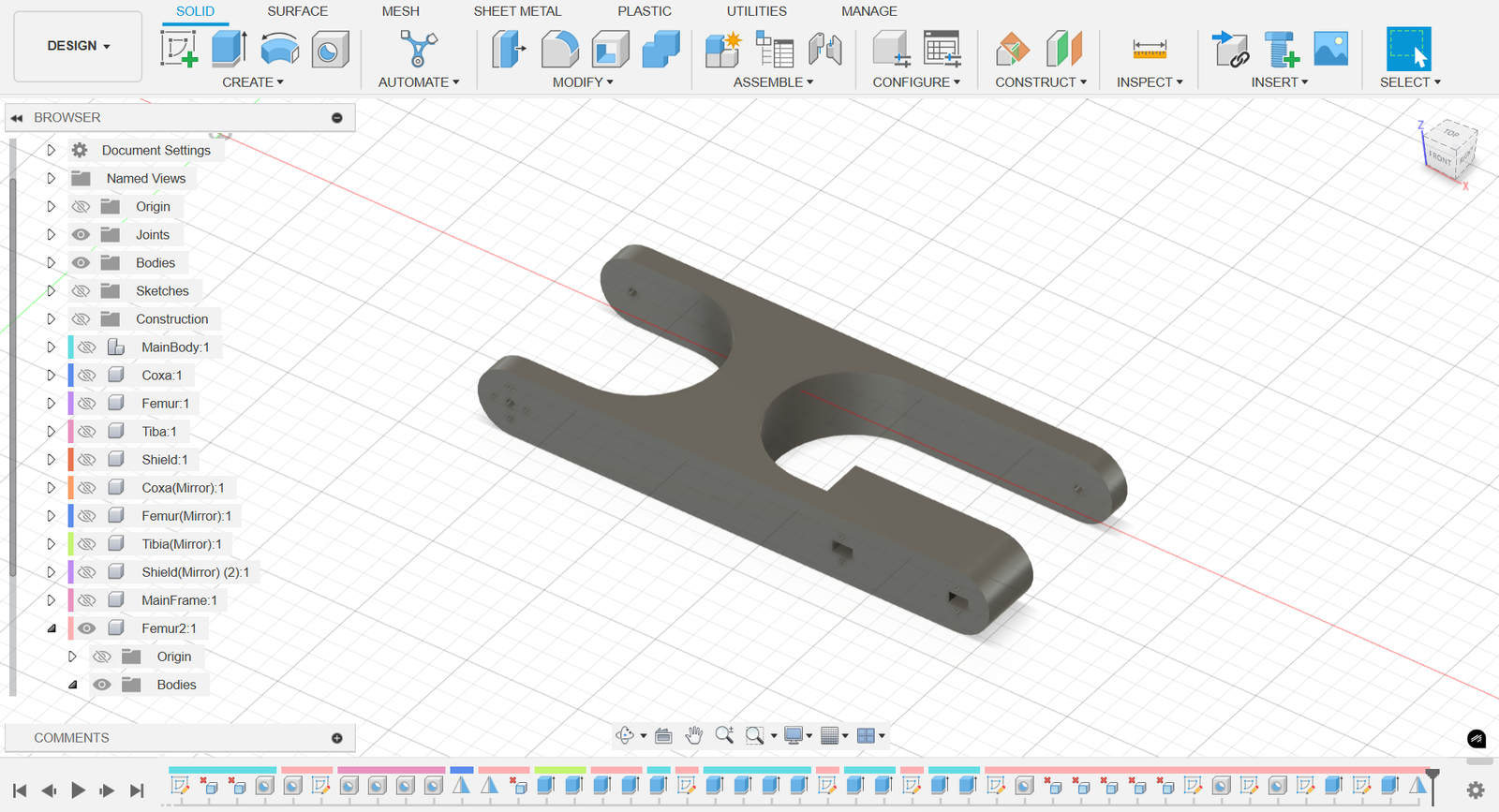
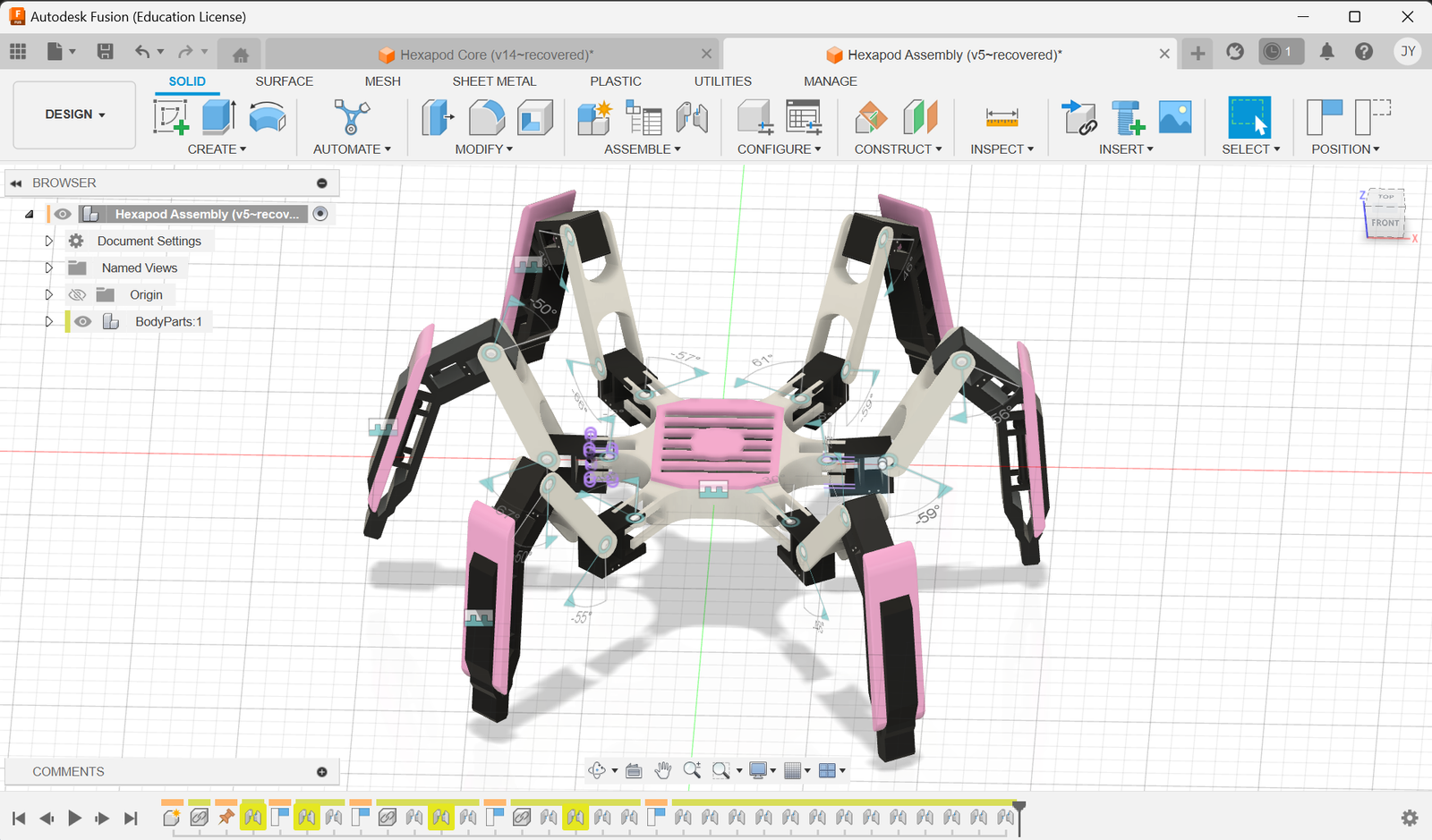
Parts & Assembly
The build includes servos, motor drivers, DC-DC regulation, a Raspberry Pi, wiring harnesses, and structural printed parts.
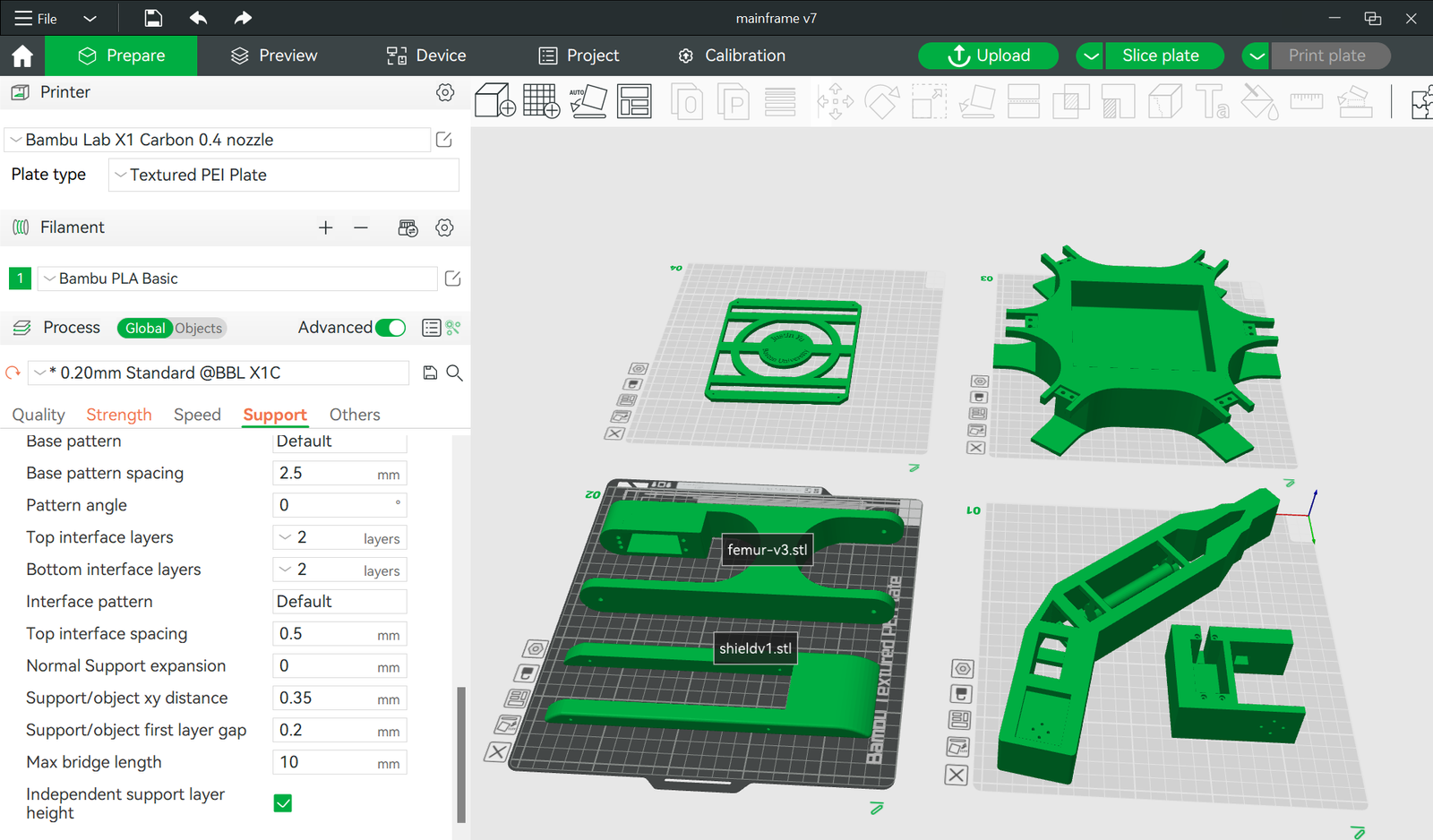
Manufacturing
Print tuning + post-processing for repeatable tolerances and consistent fastener fit.
Integration
Power distribution planning, routing for maintenance, and avoiding cable pinch points.
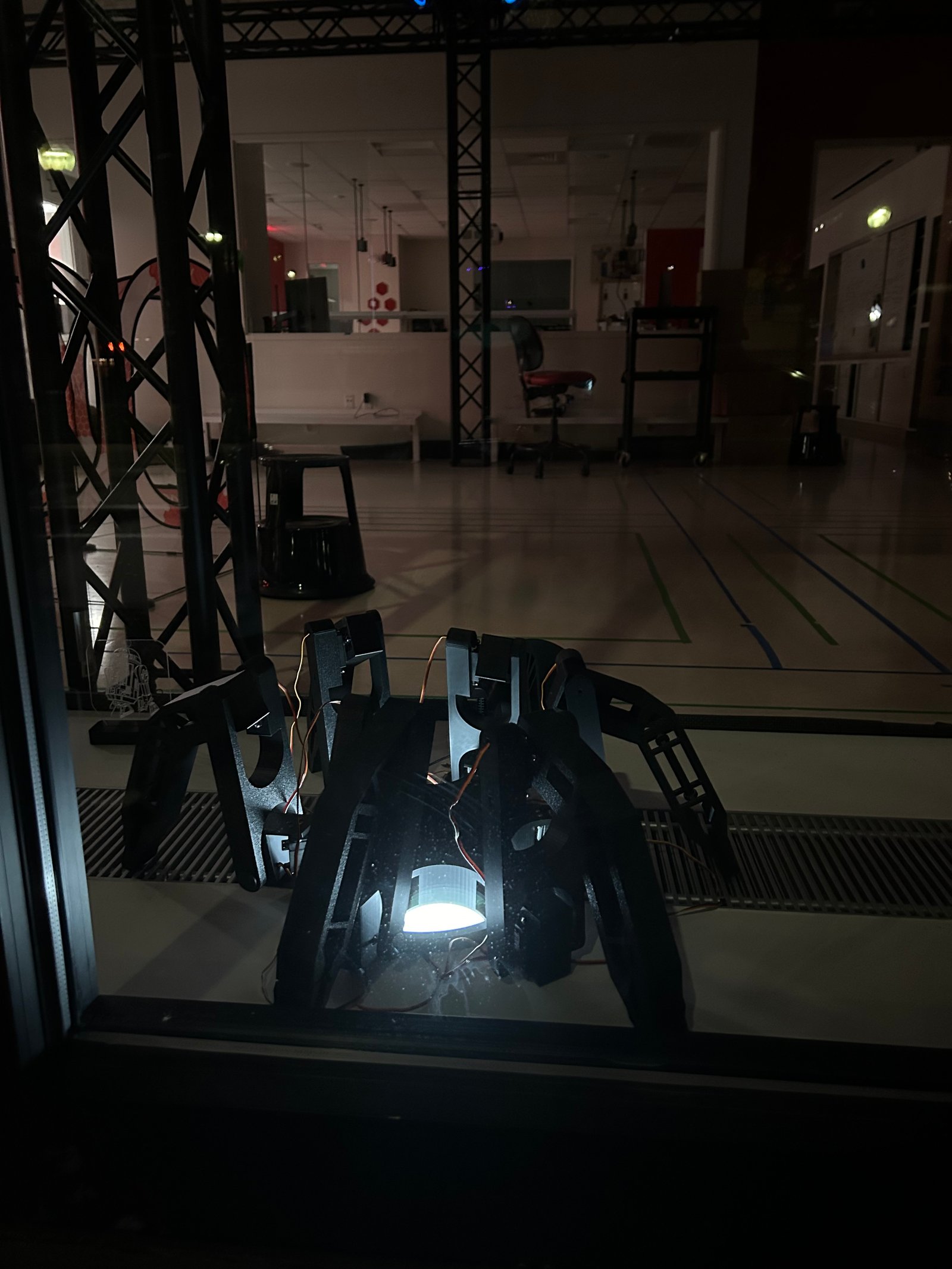
Gallery
3D printed parts and assembly photos.






Results
Major Concerns
FEA — lack of predictive modeling on load stability and insufficient traction.
Most promising direction
Iterative Development increase joint rigidity or material reinforcement (elastomeric overmolding).
Reflection
Challenges
• Balancing torque vs structure stiffness and weight
• Wiring management for maintenance without teardown
• Repeatable prints (tolerances + fastener fits)
What I learned
• Assembly-first CAD thinking
• Iterate: measure → adjust → reprint → validate
• Mechanical + electrical constraints tradeoffs
 by Justin Yu
by Justin Yu