
Overview
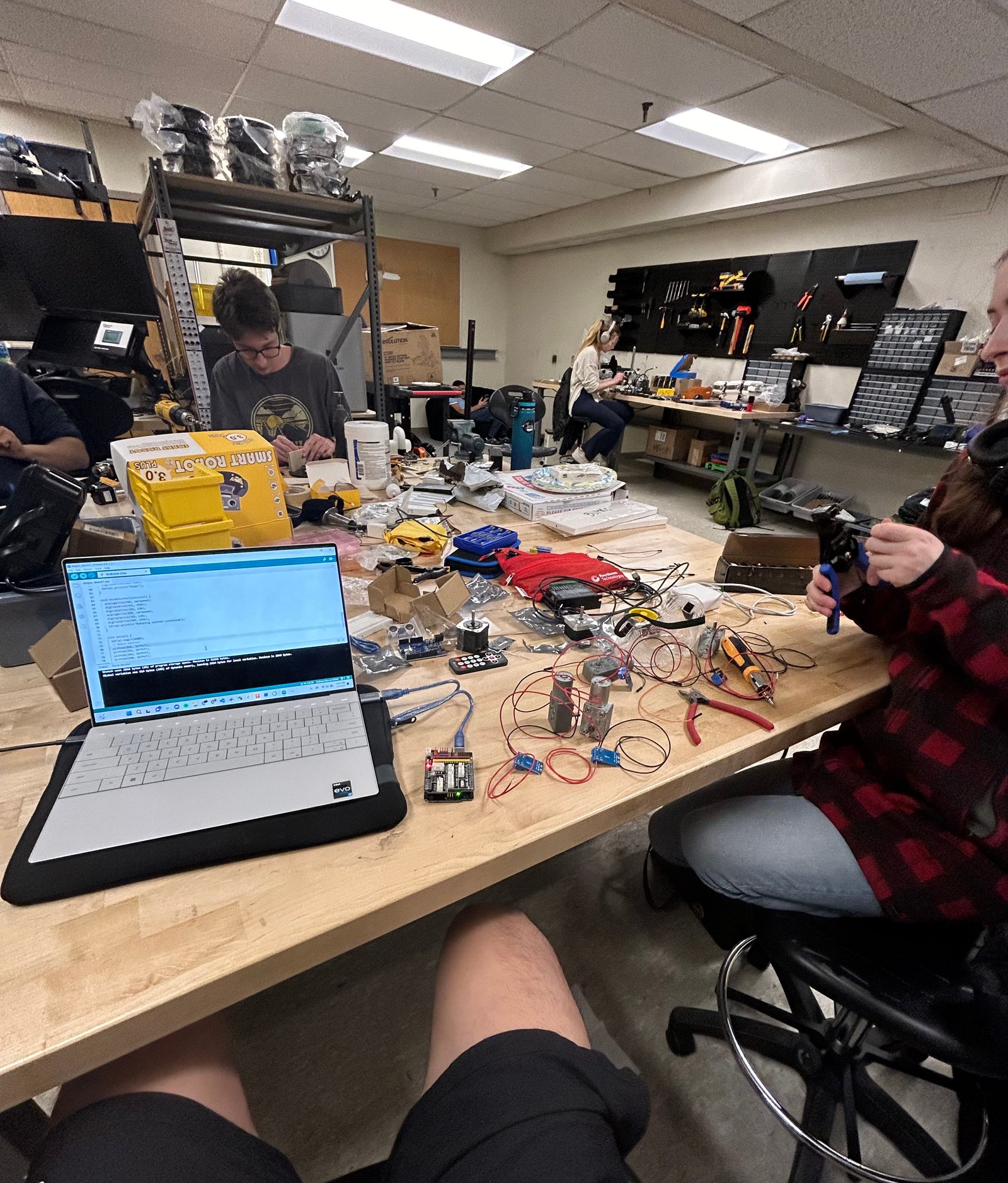
This event was held in collaboration with BU RASTIC and HackHardware to run a 24-hour robotics hackathon where teams built robots from provided kits (Elegoo Smart Robot Kits) and lab tools. My team (Charles Van Hook, Madeline Malloy, Ksenia Suglobova) intentionally deviated from the default kit chassis to build a more original rover aimed at durability, mobility, and adaptability to difficult terrains.
Tools & methods
CAD (SolidWorks/Onshape), 3D printing, CNC machining, soldering, wiring & debugging, Arduino IDE/C++.
Hardware used
UNO controller + shields, relays, motor drivers, servo + stepper motors, power supply, Dupont wires, connectors, multimeters.
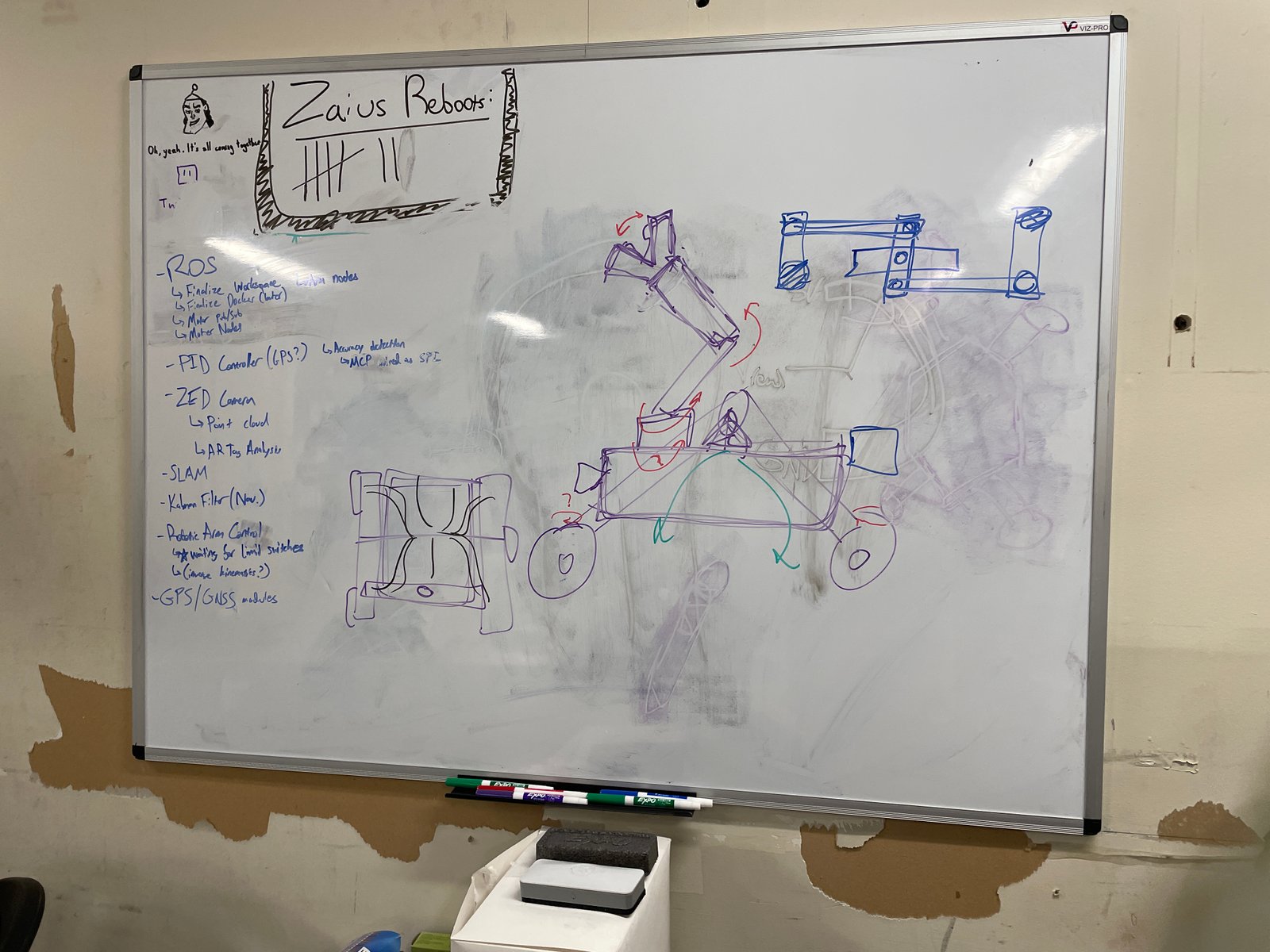
Design
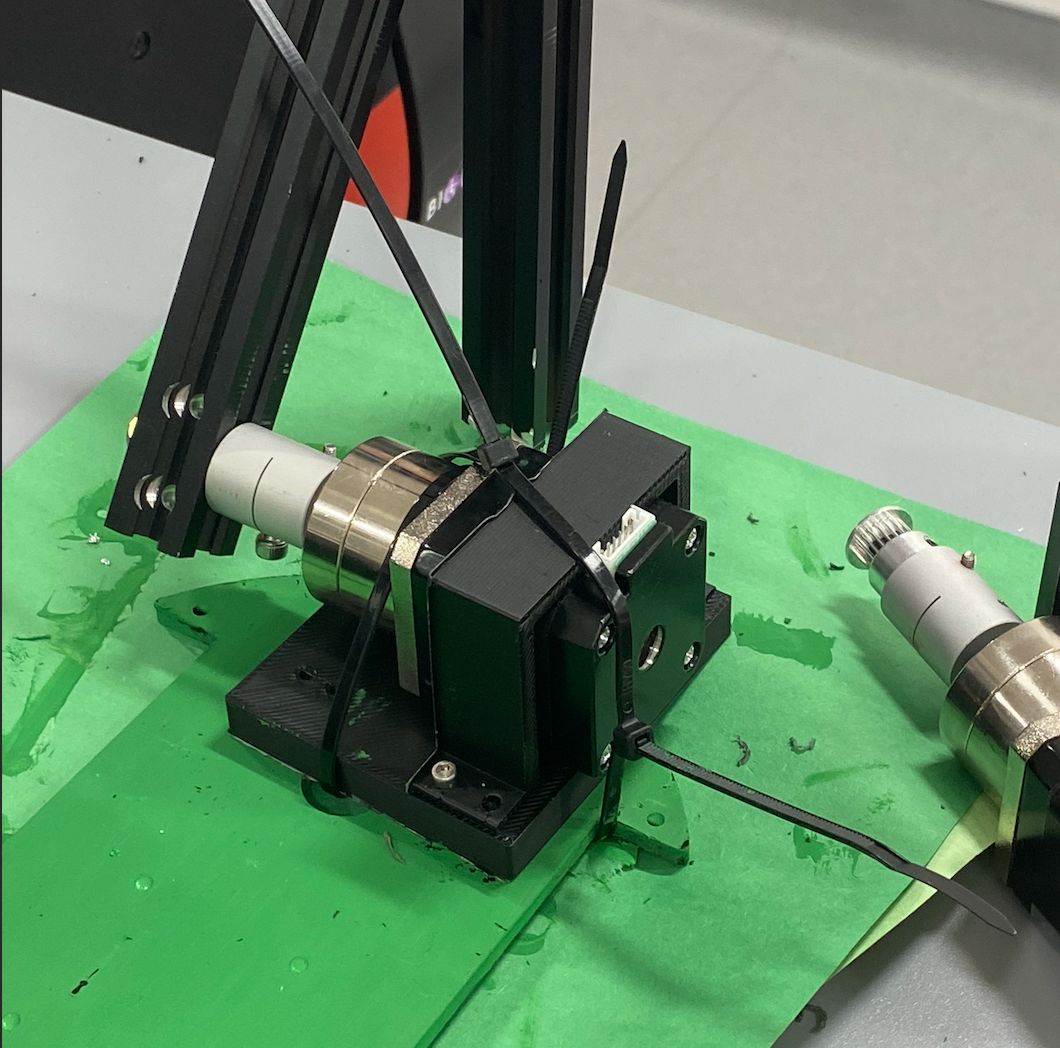
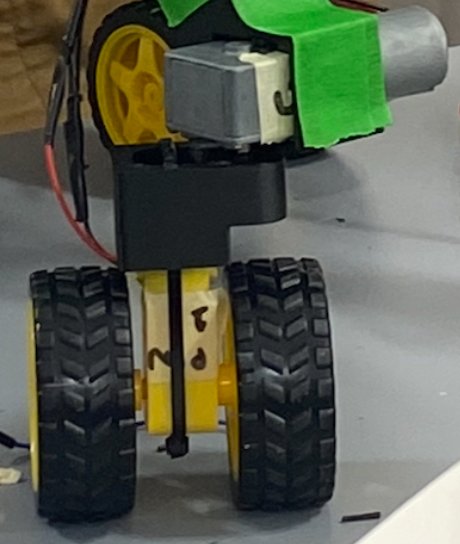
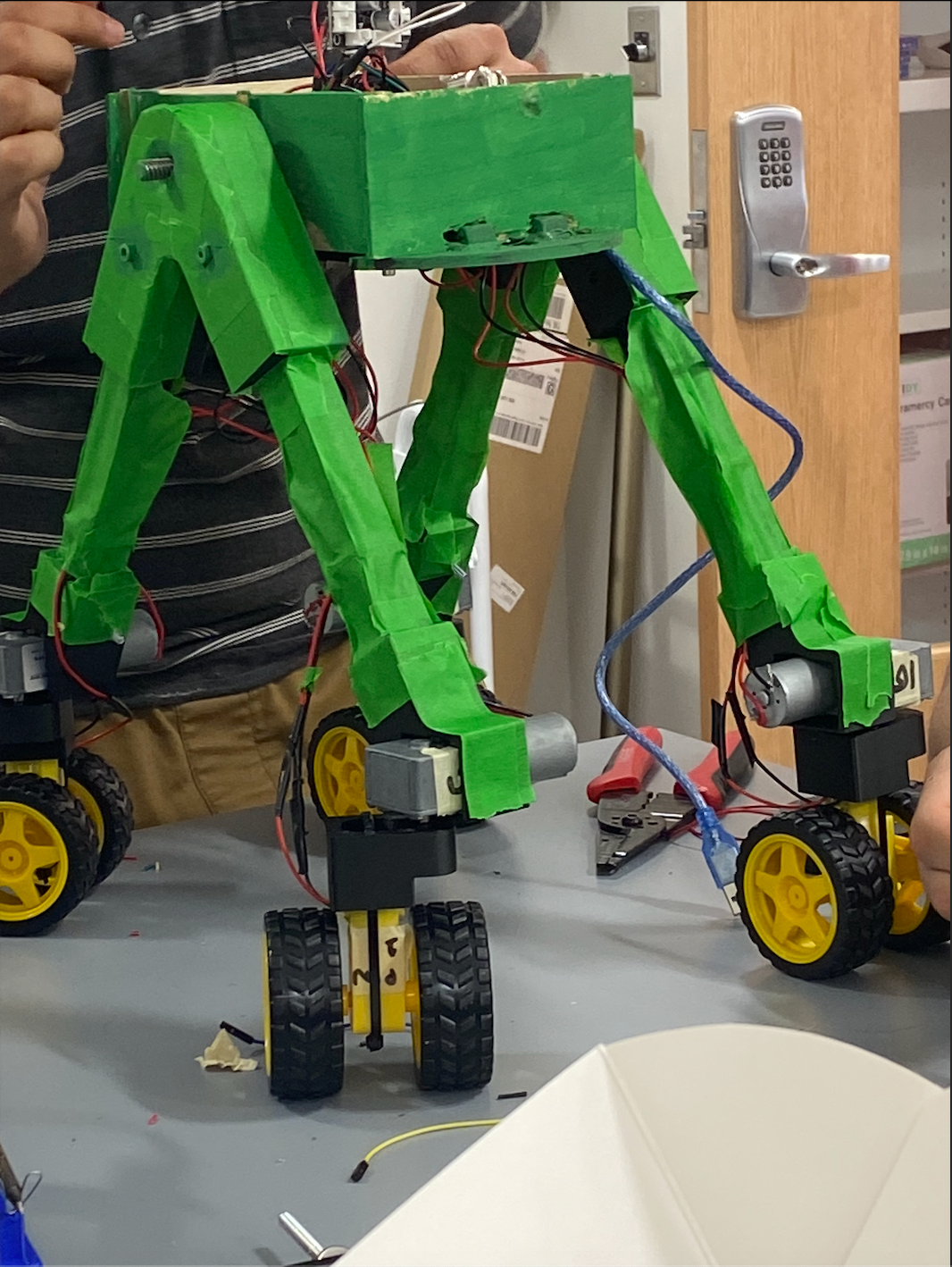
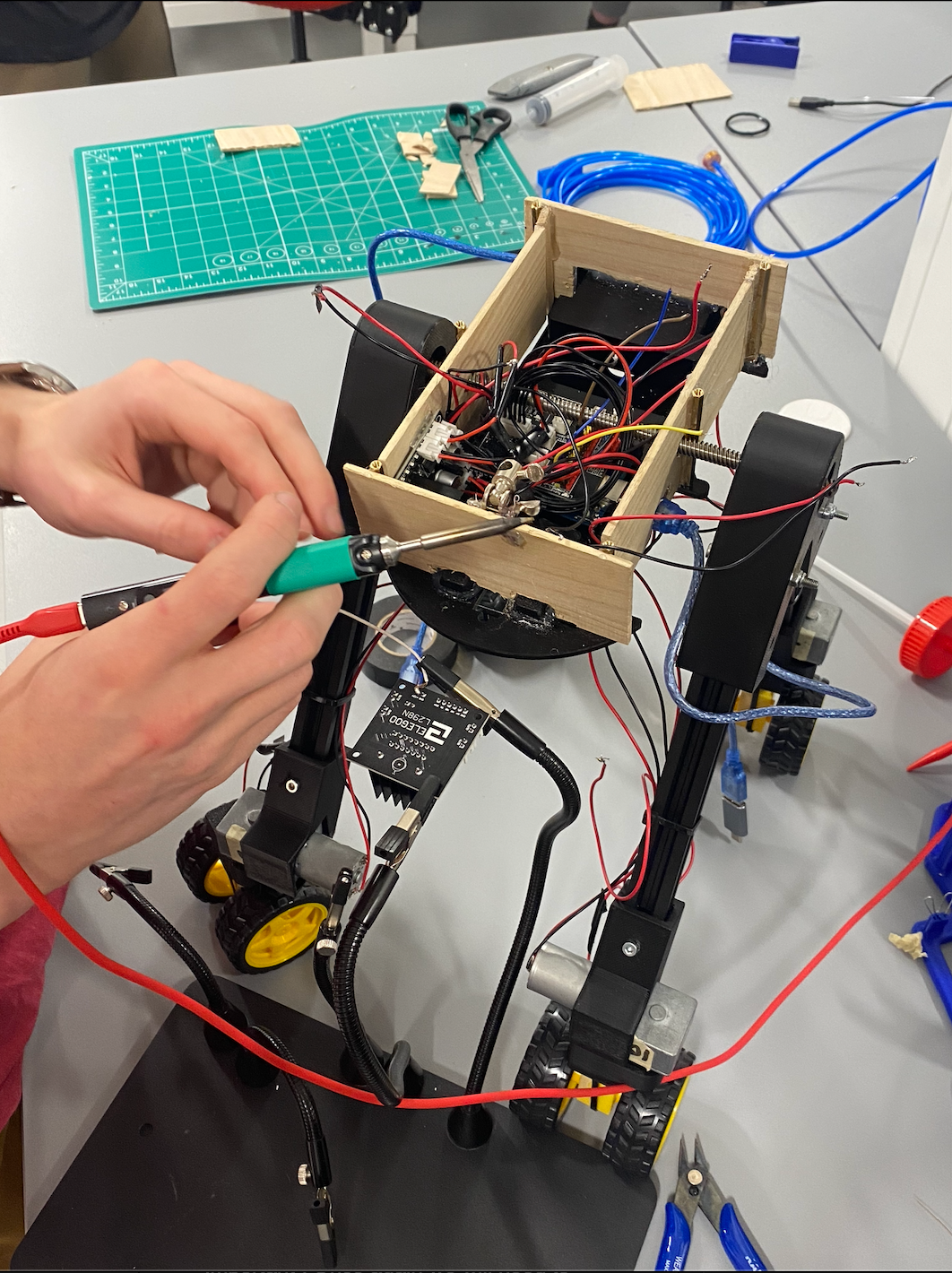
The chassis integrates wood boards and stainless steel sheets from the kit to house electrical components and manage circuitry. A V-shape suspension-like leg system improved stability and mobility, supplemented by a differential bar for balance. A servo-driven arm with a ball joint supported manipulation tasks. We also explored adding additional stepper motors to improve autonomy and turning capability.
Assembly
On day one, CAD finished for key attachments, but prints weren’t ready until the next morning. While prints ran, we crafted the chassis from wood and soldered connections to integrate additional motors/relays into the driver board’s PWM control. We couldn’t fully test code until the rover was assembled, and competition rules required autonomous motion (no controller).


Reflection
Challenges
• Circuit integration + debugging under time pressure
• Mechanical assembly with prints completing late
• Reliability: connections, mounting, and impact tolerance
• Staying in the lab past midnight and starving
What I learned
• Motor + driver fundamentals (servo vs stepper)
• Rapid iteration: build → test → fix → repeat
• Better wiring practices + cornercase handling
• Practical dimensioning to make parts “actually assemble”
 by Justin Yu
by Justin Yu